 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [ 54 ] 55 56 57 58 59 60 61 62 63 64 точные функции регуляторов выбирают с таким расче-том, чтобы получить достаточно быстропротекающий переходный процесс с малым перерегулированием - оп. тимальный переходный процесс. Эту операцию называют оптимизацией системы и производят, начиная с внутреннего ее контура. Принципиальная схема типичной двухконтурной системы приведена на рис. 6.44. Якорь двигателя получает питание от реверсивного тнристорного преобразователя ТП с двумя комплектами тиристоров - В и Н. В данном случае взята система с совместным управлением. На схеме: Тр - силовой трансформатор; Р1 н Р2 - уравнительные реакторы; СИФУВ и СИФУИ - системы управления тиристорами комплектов. Обмотка возбуждения двигателя подключена к источнику постоянного напряжения Внешний контур регулирования системы - замкнутый контур регулирования скорости двигателя. Отрицательная обратная связь по скорости осуществлена прн помощи тахогеиератора ТГ. Входное напряжение внешнего контура (входное напряжение системы), обозначенное U3.c> задает требуемую скорость двигателя, поэтом\ это напряжение называют задающим напряжением системы. Напряжение Ua.0 алгебраически суммируется с напряжением отрицательной обратной связи по скоростг- о.с Результирующее напряжение ау.с=£/а.с-иол подается иа вход усилителя PC - регулятора скорости. Не. выходе PC действует напряжение иэ.т, являющееся задающим для внутреннего контура регулирования - замкнутого контура регулирования тока якоря двигателя. В контуре регулирования тока действует отрицательная обратная связь по току, напряжение которой ы0,г снимается с выхода датчика тока ДТ и подается на вход второго усилителя РТ - регулятора тока. Здесь напряжение о.т алгебраически суммируется с задающим напряжением Из,т, образуя результирующее напряжение Му.т- На выходе РТ формируется напряжение иу - напряжение управления тиристорным преобразователем. Таким образом, в данной системе регулирование тока во внутреннем контуре происходит в соответствии с заданием, полученным от внешнего контура регулирования скорости. Иными словами, здесь коитур тока подчинен контуру скорости, отсюда и название такого вида регулирования-подчиненное регулирование. При этом регуляторы тока и скорости выполняют одновременно н функции корректирующих устройств, обеспечивающих заданное протекание переходных процессов. Они включены последовательно в прямой канал регулирования системы. Указанные особенности рассматриваемой системы обусловили ее название: система подчиненного регулирования с последовательной коррекцией. Структурная схема системы приведена на рнс. 6.45. Здесь двигатель представлен структурной схемой, соответствующей рис. 6.25,г, с учетом того, что е-кф(а= Д8и.гшпель г----И--- .1с
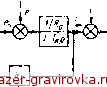 Рис 6.45. = с<о. Поэтому в цепи обратной связи по э. д. с. появилось звено с коэффициентом передачи с. Обычно влиянием внутренней обратной связи по э. д. с. пренебрегают. Преобразователь представлен апериодическим звеном с коэффициентом усиления ka и постоянной времени ЗГп- Коэффициенты обратных связей: йт- связи по току, kc - связи по скорости. Нескомпенсированной постоянной времени считаем Гп. Передаточная функция регулятора тока выбирается таким образом, чтобы скомпенсировать постоянную времени якорной цепн Тя и замкнутый контур тока был эквивалентен структурной схеме, приведенной на рис. 6.46. В этом случае с достаточно хорошим приближением передаточная функция замкнутого контура регулирования тока имеет вид: , tWP) 1 + 2ГпР(1 + Гпр) 1* 163 Чтобы получить передаточную функцию (6.87), ре[у, лятор тока должен иметь передаточную функцию kf ka 27*п Р (6.88) Уу.т ip) т. е. это будет ПИ-регулятор. При подаче напряжения скачком на вход контура то-ка переходный процесс в этом контуре будет иметь колебательный характер. Время нарастания тока до установившегося значения fpa.=s4,77,n, где Тп можно считать примерно равной 0,01 с. Перерегулирование в токе составляет Д /уст^4,3%. Кривая переходного процесса приведена иа рнс. 6.47. -
Рис. 6.46. Рис. 6.47. Передаточная функция регулятора скорости выбирается в зависимости от требований к жесткости механических характеристик двигателя. В частности, она может быть выбрана следующей*. (6.89) Как видно из (6.89), регулятор скорости в этом случае представляет собой пропорциональное звено (П-ре-гулятор). Тогда с некоторой погрешностью можно записать передаточную функцию замкнутого контура скорости как 03.с(Р) 1 + 4Гп/5(1 + 2Гпр) (6.90) Из сравнения (6.87) и (6.90) следует, что переходный процесс в контуре скорости прн подаче иа вход напряжения скачком имеет тот же характер, что и на рис. 6.47. |
|||||||||||||||||||||||
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |