 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [ 52 ] 53 54 55 56 57 58 59 60 61 62 63 64 (6-81; т. е. значения /ОГр линейно зависят от э. д. с. Е (скорости двигателя). Если выбрать ka=ljknj то согласно (6.81) ток /0Гр бу. дет оставаться постоянным при любом значении Е и равен стопорному току /стоп- Требуемое напряжение пробоя стабилитрона выбирается по заданому значению /стон: Для рассмотренного идеализнроваииого случая (значение kn принималось постоянным, ие учитывалось влияние выходного сопротивления усилителя н др.) характеристика £-/(/), т.е. в другом масштабе характеристика (о=/(/), на участке работы токоограничения представляет собой вертикальную прямую (рис. 6.39,6). На практике часто вместо стабилитрона Ст включают цепочку нз днодов (рис. 6.39,а), используя в качестве (УСт сумму постоянных составляющих прямого падения напряжения на днодах. В реверсивных приводах включают два стабилитрона или две диодные цепочки встречно-параллельно (рис. 6.39,6, в). Прн наличии в автоматической системе регулирования отрицательной обратной связи по скорости или напряжению, а также при ТК<.ТЯ переходный процесс может стать неудовлетворительным, так как возникают колебания тока и скорости со значительными перерегулированиями, или система вообще становится неустойчивой, неработоспособной. В этих случаях необходимо применять дополнительные корректирующие устройства или гибкие обратные связи. Эффективной мерой является, например, использование дополнительной отрицательной обратной связи по скорости изменения (производной) тока dijdt. Сигнал, пропорциональный dijdt, можно снимать, в частности, с обмоток дополнительных полюсов ДП и компенсационной обмотки КО двигателя. Чтобы иметь возможность изменять величину сигнала обратной связи по значению dijdt, применяют включение параллельно обмоткам дополнительных полюсов и компенсационной обмотке R1L1 цепочки, как это показано на pric. 6.40. Обмоткн ДП и КО имеют как активное сопротивление /?, так и индуктивность L. Напряжение на обмотках W и ДЯ Uab в переходных процессах уравновешивается падением напряжения на R и L, т. е. Для цепи R1L1 будет справедливо соотношение Если выбрать параметры н L1 так, чтобы 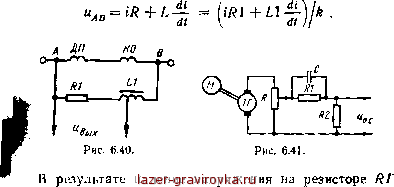 будет пропорционально току i в якорной цепи, а напряжение, снимаемое с дросселя L1, будет пропорционально dildt (считается, что активное сопротивление дросселя значительно меньше, чем R1). Корректирующие устройства могут включаться как. в цепь обратной связи, так и в прямой канал системы регулирования. На рис. 6.41 приведена схема включения корректирующего устройства в цепь обратной связи по скорости двигателя. В этом случае напряжение обратной связи 0,с будет содержать сигнал, пропорциональный не только скорости двигателя ю, но и его производной dmldt. Передаточная функция такого звена обратной связи- о-с (р) kl ±JxE <о(р) И- Т2 р1 где k = k7V£ЯеП - ; Тг = RxС\ Т2 - C\kaen-~ 1 ~~Г П2 *\1 ~г к% коэффициент передачи делителя R. В качестве корректирующих устройств, включаемых в прямой канал системы регулирования (так называемая последовательная коррекция), могут использоваться как #С-цепочкн, так и устройства на операционных усилите-лях, реализующие требуемые передаточные функции, Примеры корректирующих устройств иа базе #С-цепочек приведены на рис. 6.42. 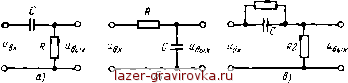 Рис. 6.42. Устройство на рис. 6.42, а имеет передаточную функцию реального дифференцирующего звена У я (Р) Тр U№{p) 1 + Тр * где T=RC. Устройство, показанное на рис. 6.42,6, описывается передаточной функцией апериодического звена U *(p) i + Tp* где T=RC. Устройство по схеме на рнс. 6.42, в имеет передаточную функцию U*x(p) 1 + Гвр гдеЛЯа/+Яа); Ti=RtC\ T2=RiRiCI(Rl+R2). Это устройство можно рассматривать как два параллельно соединенных звена: апериодическое и реальное дифференцирующее. В последнее время в электроприводах, работающих с частыми пусками и торможениями, находят широкое применение системы подчиненного регулирования с последовательной коррекцией. В этих системах в качестве |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |