 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [ 50 ] 51 52 53 54 55 56 57 58 59 60 61 62 63 64 ской характеристики двигателя в системе с токовой отсечкой; 1+-Ап)при/>/отс, (6.73) где 1отс-VoidЯдоб- ток отсечки. Как видно из (6.73), характеристика представляет собой участок прямой линии, проходящей через фиктив- 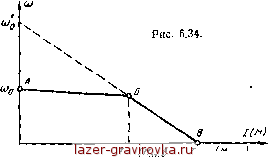 L0TC 1аоп стоп иую точку, лежащую на осн скорости: (й'0=*(ГЛх-т* Ч-£/0Тс)йп/(АФн), и точку 1 стоп 1 1 , Z (6.74) лежащую на оси токов; /стоп - ток при скорости, равной нулю, называется током стопорения. Характеристика показана иа рис. 6.34. На участке АБ токовая отсечка не действует. На участке БВ действует токовая отсечка и характеристика удовлетворяет уравнению (6.73). Обычно ток стопорения /Стоп выбирают, исходя из максимально допустимого значения тока якоря двигателя. Ток 7отС выбирается в зависимости от желаемого наклона характеристики. Прн известных значениях /ст<щ и /0Тс рассчитывается /?ДОб для данной схемы. Из (6.74) после подстановки С/отс=/отс/?доб получим: Цвх&п - 7стой (/стоп - / отс) *п (6.75) Затем определяется необходимое напряжение сравнения Л)ТС = Л>тс#доб- (6.76) Для реверсивного преобразователя, когда ток в якорной цепи может менять знак, схема с токовой отсечкой - и-) 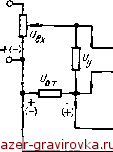 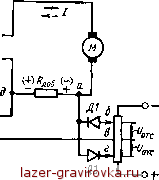 гРис. 6.35. 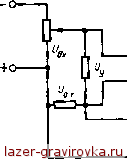 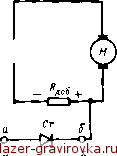 Рис. 6.36. приведена на рнс. 6.35. Полярности на схеме без скобок указаны для условного направления Вперед . Если ток в якорной цепи больше /0Тс> то Ur станет больше С/отс и будет проходить ток обратной связи по цепи: точка а, вентиль Д2, точка г, точка в, узел сравнения, точка д. При обратной полярности тока в якорной цепи и UtXJoic ток обратной связи протекает по цепн: точка д, узел сравнения, точка в, точка б, вентиль Д/, точка а в якорной цепи. Следует отметить, что вместо напряжения сравнения i/отс могут использоваться стабилитроны Ст с пробивным напряжением, равным f/0Tc- Схема для этого случая приведена на рис. 6.36. При реверсивном варианте используют два обратно включенных стабилитрона, как это показано внизу на рис. 6.36. Таким образом, выбирая те или иные обратные связи с необходимыми коэффициентами, можно получить желаемые механические характеристики двигателя. - 6.5. СПОСОБЫ ФОРМИРОВАНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ Как уже отмечалось в § 6.1, автоматические системы регулирования должны не только поддерживать регулируемую величину на заданном уровне в установившемся режиме, но и обеспечить требуемый характер протекания переходных процессов. В зависимости от требований к системе электропривода возможны два подхода к построению автоматических систем регулирования. В первом случае выбирают параметры обратных связей с целью получения желаемых механических характеристик, после чего анализируются переходные процессы в системе регулирования. Если характер протекания переходных процессов не удовлетворяет предъявляемым требованиям, в систему регулирования вводятся или дополнительные корректирующие устройства или гибкие обратные связи, улучшающие переходные процессы, но ие изменяющие механических характеристик двигателя. Во втором случае автоматические системы регулирования строятся из условия обеспечения требуемого характера переходных процессов и одновременно принимаются меры для получения удовлетворительных механических характеристик. Так поступают, например, при использовании систем подчиненного регулирования с последовательной коррекцией, нашедших в последнее время широкое распространение. Если нет ограничений ускорения со стороны механизма и требуется получить малое время пуска двигателя, формирование переходно- |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |