 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 Прн известном значении Дсор можно найти из (6.66) коэффициент обратной связи по напряжению, необходимый для получения заданного значения Д<а3: 1 (Ашр/Дюэ) - 1 Ад.необх - kn I - (Дйр/Дю3)(#д/#о) каигу1<о.и1 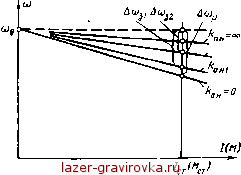 Рис 6.31. (6.67) Рис. 6.30. В тех случаях, когда требуется получить более жесткие характеристики электропривода, чем это может обеспечить система регулирования с отрицательной обратной связью по напряжению, применяют отрицательную обратную связь по напряжению совместно с положительной компенсирующей связью по току. Такая схема приведена на рис. 6.31. Здесь напряжение управления и7Л, подаваемое на СИФУ, равно: 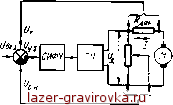 где Uo,s=kHUa; Ur=k?IRo, коэффициент токовой связи Уравнение электрического равновесия якорной цепи для этой схемы будет иметь вид: (Рим-fe + M* >+ (6.68) Подставив в (6.68) £/д=&фн(Оз-К#д, после преобразований получим: 1 + ~ kn kn - kT kn Див = ш05 - co3 = Дсор-\ , u u- (6.69) I г H П Из (6.69) видно, что изменяя величину kVt можно получить, например, Д<а3=0, если 1+Мп~Мп = 0. (6.70)
Если же выбрать коэффициент kH и kT так, чтобы 1 -f- - АдАп - АТАП< 0, тоДсйз станет отрицательными е. Ra с увеличением нагрузки иа валу двигателя скорость его будет ие снижаться, как в разомкнутой системе, а возрастать. Характеристики для рассматриваемой схемы приведены иа рис 6.32. Целый ряд механизмов может требовать от системы управления электроприводом ограничения момента (или тока) двигателя прн возникновении перегрузок. Иногда возникают требования ограничения скорости, напряжения и т. д. В таких случаях для получения желаемых механических характеристик могут дополнительно применяться отрицательные обратные связи с отсечками. Наибольшее распространение находит отрицательная обратная связь по току с отсечкой (токовая отсечка). Схема с токовой отсечкой приведена на рис. 6.33. Принято, что другие обратные связи, обеспечивающие требуемую жесткость механических характеристик, отсутствуют. Б этой схеме при токах, меньших определенного значения (пока Ut<U0tc где U0rc - напряжение отсечки), на узел сравнения СУ поступает только входное напряжение Usx и система представляет собой обычную ра- 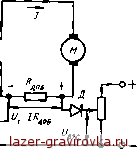 Рис 6 33 зомкнутую систему. С возрастанием тока двигателя прн увеличении нагрузки на его валу возрастает напряжение t/T- ?доб. Прн с/т>С/отс разность напряжений, т. е. сигнал обратной связи по току U0.V=~UT-U0TC, (6.71) будет подаваться на узел сравнения (разность обратного знака подаваться ие может из-за вентиля Д). Появление напряжения U0T уменьшит при неизменном £/вх напряжение Uy=Un-VQt, что приведет к снижению напряжения иа тиристорном преобразователе и скорости двигателя. Уравнение электрического равновесия якорной цепи прн работе токовой обратной связи будет иметь вид- (Ue, - U0 т) kn = кФя о) + №0. (6.72) Подставив в (6.72) U0.r из (6.71) и UT=IRa06, после преобразований найдем уравнение электромеханиче- |
|||||||||||||||||||||||
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |