 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [ 48 ] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 Нз рис. 6.27 приведены характеристики двигателя в разомкнутой и в замкнутой системе для различных ко-эффициентов обратной связи по скорости. Здесь при моменте М=МСУ показаны падение скорости Дюр в разомкнутой системе и падения скорости Даы и Да 32 в замкнутой системе при kc=kc\ и fcc-ftc2. Из (6.58) при известном Дсор можно найти коэффц, цнеит обратной связи по скорости kc.He06x, необходимый 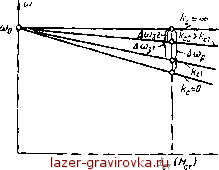 Рис. 6.27. для получения в замкнутой системе заданного падения скорости Дсо3: К* *- А^-[ . (6.59) Если по каким-либо причинам необходимый коэффициент Ас.необх не может быть реализован, то в прямой канал включают дополнительный усилитель У (с коэффициентом усиления fey), как это показано на рис. 6.28. Б этом случае с.необх = снеобх/ где Аснеобх -необходимый коэффициент обратной связи по скорости при наличии дополнительного усилителя. Очевидно, что ky можно выбрать таким, чтобы kzaeoux всегда удавалось реализовать. В некоторых случаях вместо обратной связи по скорости, для измерения которой требуется тахогенератор или другое устройство (например, тахометрическнй мост), используют отрицательную обратную связь по
0£ Узел а  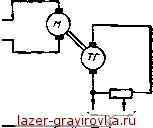 Рис. 6.28.  Рис. 6.29. напряжению двигателя. Такая схема приведена на рис. 6.29. Здесь на входе СИФУ сравниваются напряжения UBx.3 И U0.h Напряжение U0.n представляет собой напряжение обратной связи, пропорциональное напряжению на двигателе UR. Оно снимается с части потенциометра П и равно: где /ен - коэффициент обратной связи по напряжению. Для приведенной схемы значение э. д. с. преобразователя может быть Найдено из следующего равенства: £ц - Uy* К - (иш - о.н) Ад- (6.60) Уравнение электрического равновесия якорной цепн с учетом (6.60) будет иметь вид: <</вм - *д^д) К = £Фн > + /Л . (6.61) Учитывая, что £/д=&Фна +/Яд (/?д - собственное сопротивление двигателя), после преобразований нз (6.61 ) получаем: .Л = (I + *п ад + (l + Ац Ан) . (6.62> В режиме идеального холостого хода в замкнутой системе тт Ц>оз U + fen (6.63) В разомкнутой системе (feH-0) С/ах.р останется тем же, что и в предыдущем случае; т. е. Uhx-p-j{kakA). Если соор=а>оз, то связь между входными напряжениями f/вх.з и Uax.p будет иметь вид: B*.3-£W!+£nU (6-64) Из (6.64) видно, что в системе с отрицательной обратной связью по напряжению для получения той же скорости идеального холостого хода, что и в разомкнутой системе, входное напряжение должно было увеличено в i-j-knkE раз. Подставив с/вх.з из (6.64) в (6.62), с учетом, что /Яо/(АФн) ~Дй)р, после преобразований получим: Д )3 = (йод-<а3 = Д(ор 0 . (6.65) Как видно из (6.65), падение скорости Дсо3 в системе с обратной связью по напряжению двигателя меньше, чем в разомкнутой системе. Так как #д всегда меньше RQ, то Дю3 с ростом ka уменьшается. При очень больших значениях кя (&H-s-oo) можно считать, что fe feH>l и АПАН>1. Тогда (6.65) будет иметь вид: - к к Aa3=A<i>J0 Д Н =Lgg- = £g£., (6.66) 3 р кикн АФН Д. йФн Таким образом, при бесконечно большом коэффициенте обратной связи по напряжению падение скорости двигателя при приложении нагрузки будет таким же, как в случае питания его якоря от сети постоянного тока с бесконечно большой мощностью (когда сопротивление сети равно нулю). Если в разомкнутой системе угловая скорость двигателя снижалась при его нагрузке за счет падения напряжения в преобразователе и в двигателе, то в системе с обратной связью по напряжению падение напряжения в преобразователе компенсируется благодаря увеличению напряжения Uy. Характеристики двигателя в системе с отрицательной обратной связью по напряжению приведены иа рис. 6.30. |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |