 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [ 39 ] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 в которой обратная связь осуществляется по напряжению тахогеиератора ТГ, пропорциональному скорости двигателя. Здесь на входе СИФУ сравниваются входное напряжение Овх и напряжение U0.c, пропорциональное скорости двигателя. В качестве датчика скорости в данном случае используется тахогенератор, представляющий собой машину постоянного тока, механически связанную с валом двигателя. Напряжение тахогеиератора UTr пропорционально скорости двигателя: г/тг-о), (6-2) где &гг - коэффициент передачи тахогеиератора. Напряжение обратной связи U0.c представляет собой часть напряжения £/тг: о.о = *дал Urr h > (6.3) где йдел - коэффициент, показывающий, во сколько раз уменьшается с помощью потенциометра напряжение Отг', kc=kAenkvr - коэффициент передачи обратной связи. На СИФУ подается напряжение Uy, представляющее собой разность V7 = UBJi-U0C. (6.4) Оно определяет угол регулирования и выпрямленную э. д. с. преобразователя. При работе двигателя с каким-либо установившимся значением скорости ©уст напряжение Uy имеет вполне определенное значение. Если при постоянном значении £/вх произойдет, например, снижение скорости при увеличении нагрузки или под действием другого возмущения, то в соответствии с (6.2) и (6.3) уменьшатся напряжение тахогеиератора Стг и напряжение и0.с- В результате, как это следует из (6.4), увеличится напряжение Uy, а значит, уменьшится угол регулирования а и возрастет выпрямленная э. д. с. преобразователя, что приведет к восстановлению скорости. Но восстановление скорости может произойти не до прежнего значения муст, а до некоторого нового установившегося (йуст<<йУст,т- е- с некоторой ошибкой Аналогично этому при увеличении скорости под действием какого-либо возмущения при постоянном UBX увеличится Uo.c, уменьшится U7, увеличится угол а и уменьшится выпрямленная э. д. с. преобразователя, что приведет к снижению скорости. Следовательно, скорость двигателя в системе регулирования по отклонению будет поддерживаться при неизменной величине С/вх на постоянном уровне с определенной степенью точности. В электроприводе чаще всего основным возмущением является изменение нагрузки на валу двигателя. Требования к жесткости механических характеристик (оцениваемой значением ДЛГ/Дю), т. е. к изменению скорости двигателя при изменении нагрузки, могут быть самыми различными в зависимости от назначения и технологического режима механизма, приводимого двигателем. От некоторых электроприводов требуются очень жесткие механические характеристики, при которых изменение момента нагрузки на валу двигателя в пределах от нуля до номинального вызывает снижение скорости не более чем на доли процента. Примером таких электроприводов могут служить электроприводы рабочих валков непрерывных станов холодной прокатки. Встречаются электроприводы, в которых ие предъявляется каких-либо требований к точности поддержания скорости двигателя, но требуется поддерживать постоянной другую величину. Примером таких электроприводов могут служить различные наматывающие и разматывающие устройства, обеспечивающие поддержание постоянства натяжения обрабатываемого материала. Кроме получения определенной точности поддержания скорости (или иной величины) в установившихся режимах, к автоматическим системам регулирования могут предъявляться требования к характеру изменения скорости, тока или момента двигателя во время переходных процессов при изменении управляющего или возмущающего воздействия. Так, может требоваться от автоматической системы регулирования обеспечение равноускоренных переходных процессов при заданном ускорении. В некоторых случаях требуется быстрое протекание переходных процессов с малыми изменениями скорости при ударном приложении нагрузки и т. д. Требования, предъявляемые к системам регулирования из условий получения желаемых механических характеристик и нужного характера протекания переход- ных процессов, могут быть разными. Это приводит к то- \ му, что системы регулирования выполняются различным образом и могут содержать в себе разнообразные элементы. 6.2. ЭЛЕМЕНТЫ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ Как уже говорилось в § 6.1, автоматические системы регулирования могут состоять из различных по назначению и устройству элементов. К наиболее распространенным элементам относятся датчики, усилители, суммирующие, формирующие и командные устройства и др. 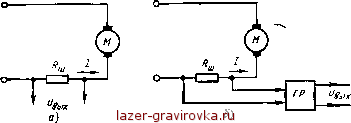 Рис. 6.3. Датчики служат для получения сигнала, пропорционального регулируемой величине. Они могут измерять как непосредственно регулируемую величину, так и величины, косвенно связанные с пей. Наиболее простым датчиком тока служит шунт или добавочное сопротивление, включаемые последовательно в цепь якоря двигателя (рис. 6.3, а). Выходное напряжение в этом случае UBblx-lRm или £/Вых=&д,тЛ где &д.т= -Rm - коэффициент передачи датчика тока. Прн использовании шунта выходное напряжение при номинальном токе обычно составляет 45 или 75 мВ. Поэтому напряжение C/BM должно подаваться еще на дополнительный усилитель с тем, чтобы потом усиленный сигнал использовать в автоматической системе регулирования. Иногда вместо включения дополнительного сопротивления в якорную цепь, что всегда ведет к потерям электроэнергии, используют для снятия сигнала, пропорционального току, обмоткн дополнительных полюсов двигателя. Недостатком таких датчиков тока является потенциальная связь силовой цепи с системой управления, что |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |