 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [ 37 ] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 павления, равном Uyi, э. д. с. группы В равна Яв1 (точка / на рис. 5.19,6), а э. д. с. группы Я, которая при этом переведена в инверторный режим, равна Еа\. Если, например, двигатель работает на идеальном холостом ходу, т. е. при отсутствии момента сопротивления иа валу двигателя, его э. д. с. Е равна э. д. с. Ящ и меньше э. д. с. Яиь Для снижения угловой скорости двигателя нужно уменьшить напряжение управления Uy. С уменьшением Uy уменьшаются одновременно Яв н Яи, э. д. с. двигателя в первый момент измениться не может из-за присущей двигателю механической инерции. Для снижения угловой скорости двигателя необходимо, чтобы в его якоре появился отрицательный ток, а для этого э. д. с. двигателя должна быть больше э. д. с. группы Я, переведенной в инверторный режим. При снижении напряжения управления U7 иа интервале Uv2.Uy.Uy\ (рис. 5.19,6) э. д. с. двигателя, которая остается неизменной и равной Явь будет меньше э. д. с. Еа<Ещ группы Я, т. е. ток в двигателе будет отсутствовать. При напряжении управления UY=Uy2 э. д. с. группы Я достигнет значения Еи2=Еа1=Е (точка 2), и лишь прн £/у< <.и72 э. д. с. группы Я станет меньше Я, в результате чего появится ток в двигателе и начнется его торможение. Следовательно, при нелинейном согласовании в некотором интервале изменения напряжения управления двигатель не управляется. Этот интервал является мертвой зоной нлн люфтом управления. Наличие люфта приводит в ряде случаев к ухудшению динамических характеристик электропривода. Рассмотрим теперь характеристики электропривода с раздельным управлением группами вентилей реверсив-иого преобразователя. Принципиальная схема электро-I привода изменится только за счет исключения уравни-t-тельиых реакторов (например, в схеме на рис. 5 23). f В работе всегда находится лишь одна из групп вентилей, f в то время как вентили другой группы закрыты. При не-I обходимости изменить направление тока в якоре двига-: теля группы меняются ролями. Такой электропривод будет иметь два независимых друг от друга семейства электромеханических (механических) характеристик. Одно семейство соответствует работе группы В, второе- работе группы Я. Если принять направление тока якоря прн работе группы В за положительное, то семейство характеристик, отвечающее работе группы В, будет точно таким же, как и для электропривода с нереверсивным преобразователем (см. рис. 4.4). Другое семейство характеристик при работе группы Я будет аналогичным, но расположится в квадрантах II н III. Взаимное расположение обоих семейств электромеханических характеристик существенно зависит от способа согласования регулировочных характеристик преобразователя. Как и при совместном управлении, здесь также возможно н линейное и нелинейное согласование. 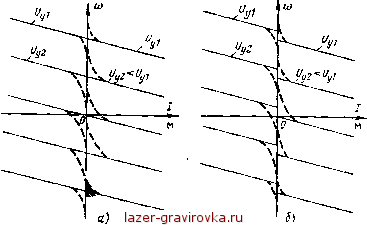 Рис. Б.27. При линейном согласовании характеристики электропривода будут иметь вид, показанный на рис. 5.27, а. В этом случае характеристики электропривода, соответствующие работе групп В и Я для одного и того же напряжения управления £/у> в зоне непрерывного тока лежат на одной прямой. При нелинейном согласовании характеристики электропривода соответственно для работы групп В и Я при одном и том же значении напряжения Щ смещены одна относительно другой, как это видно из рис. 5.27, б. Сравнение электромеханических (механических) характеристик при различных способах управления группами вентилей реверсивного преобразователя показывает, что наилучшие характеристики получаются при работе групп с уравнительным током, в особенности при согласованном управлении. При нелинейном согласова- нни и особенно прн раздельном управлении характеристики при малых нагрузках двигателя (в зоне прерывистого тока) становятся нелинейными и появляется люфт управления. Раздельное управление из-за нелинейности и разрывности характеристик в режиме прерывистого тока может оказаться неприемлемым для электроприводов, которые должны работать и при малых нагрузках иа валу, в том числе в режиме идеального холостого хода или близком к нему. Отрицательно сказывается на динамических свойствах электропривода и наличие бестоковой паузы прн раздельном управлении. ГЛАВА ШЕСТАЯ АВТОМАТИЧЕСКИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ ВЕНТИЛЬНЫХ ЭЛЕКТРОПРИВОДОВ 6.1. ОБЩИЕ СВЕДЕНИЯ В вентильных электроприводах, как было показано, можно в требуемых пределах изменять угловую скорость двигателя путем изменения угла регулирования а тири-сторного преобразователя. В свою очередь, угол а зависит от напряжения Uy на входе СИФУ преобразователя. Будем называть это напряжение управляющим воздействием. Таким образом, скорость двигателя можно регулировать, изменяя управляющее воздействие на входе тиристорного преобразователя. В некоторых электроприводах наряду с регулированием скорости может требоваться регулирование напряжения на якоре двигателя, тока двигателя, момента и т. д. Следует отметить, что регулируемая величина, например угловая скорость, зависит не только от управляющего воздействия, но и от целого ряда других воздействий, называемых возмущающими воздействиями. В качестве возмущающих воздействий могут быть изменение нагрузки на валу двигателя, колебания напряжения питающей сети, изменение сопротивления якорной цепи при изменении температуры и др. Все это ведет к отклонению регулируемой (выходной) величины от заданного значения. В гл. 4 при рассмотрении механических характеристик вентильного электропривода было показано, как изме- |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |