 |
(495)510-98-15
|
|
Меню
|
Главная » Классификация электронных систем 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 [ 174 ] 175 176 177 178 179 180 181 182 183 184 Входную характеристику инвертора при Xd = со можно получить из совместного решения (7.130) и (7.133) или непосредственно из равенств (7.81) и (7.83) Ua = EM + tAJx = VWE, sin -cosp + V (7.135) Если в (7.135) подставить т 6 Уз -I ггг 3 л d (5-0) 6, то получим 1/2 Е2cos р + -/dXa = £d(Р=0) cos р + /Л (7.136) - предельное (практически недостижимое) значение напряжения инвертора при Р = 0. Для получения входной характеристики инвертора в относительных единицах разделим все члены равенства (7.136) на У2 Е2, а также умножим и разделим второе слагаемое на базовый ток короткого замыкания /2К. В результате получим 1.05\ 0,35 0,05 0,1 0,15 0,2 Id Ггя т =1,65 cos р + 1,1-. (7.137) Характеристики, соответствующие этому уравнению, нанесенные сплошными линиями на рис. 7.82, соответствуют Ха = со, а пунктирными - конечному значению Ха. Рассмотренные входные характеристики действительны, пока в режиме одновременного проведения тока в пределах одного моста участвует не более трех вентилей Регулирование передаваемого тока (передаваемой мощности) можно осуществлять, изменяя подводимое напряжение Ud или изменяя угол р. Нередко значение угла Р регулируется автоматически в соответствии с изменением нагрузочного тока инвертора и возможного колебания напряжения в приемной сети переменного тока. При таком регулировании достигается более высокое значение коэффициента мощности и устойчивая во всех режимах работа ведомого сетью инвертора. Рис 7.82. Входные характеристики инвертора при двух значениях угла опережения § 7.16. ПЕРЕХОД ОТ ВЫПРЯМИТЕЛЬНОГО РЕЖИМА К ИНВЕРТОРНОМУ В ЭЛЕКТРОПРИВОДЕ ПОСТОЯННОГО ТОКА В промышленных электроприводах постоянного тока эффективное и вместе с тем наиболее экономичное торможение двигателя может быть достигнуто переводом двигателя в генераторный режим. При этом преобразователь выполняет функции инвертора, и поток мощности, изменив направление, проходит от машины постоянного тока в сеть переменного напряжения. Принципиальная схема преобразователя, допускающего двустороннее обращение потока мощности в вентильном электроприводе постоянного тока, приведена на рис. 7.83, а. Питание вентилей осуществляется здесь через две трехфазные группы обмоток, соединенных в зигзаг. Выходы от преобразователей присоединены к внешним зажимам машины противоположными полюсами (перекрестное соединение). При такой перекрестной (восьмерочной) схеме система сеточного управления одного из преобразователей настраивается на работу его в качестве выпрямителя, питающего дви- А В С 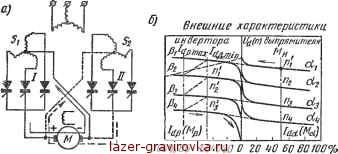 Рис. 7.83. Двусторонний преобразователь для реверсивного .электропривода постоянного тока; а - схема; б - внешние характеристики гатель, а у другого - на работу его в качестве инвертора, ведомого сетью. Последний обеспечивает режим генераторного торможения. Сопряжение углов а и Р, определяющих положение внешних характеристик в системе координат (рис. 7.83, б), производится, исходя из равенства средних значений напряжения на выпрямителе и инверторе при таком минимальном значении постоянного тока, ниже которого кривая выпрямленного тока становится прерывистой. При таком сопряжении углов а и Р не только обеспечивается плавный переход от выпрямительного режима к инверторному, но и приемлемая величина циркуляционного тока, протекающего по замкнутым контурам анодных ветвей выпрямителя и инвертора. Нужное сопряжение углов достигается при соблюдении равенства 2Аи cosa - cosp = = 2e, (7.138) где ДсЛ, - абсолютное значение падения напряжения в вентиле, а 8 - его относительное значение. Построенное по этому уравнению семейство выпрямительно-инверторных внешних характеристик на рис. 7.83, б может рас- сматриваться одновременно и как семейство механических характеристик двигателя, поскольку скорость вращения двигателя п [об/мин] почти пропорциональна Еа, а вращающий момент двигателя при постоянном токе возбуждения пропорционален току в цепи якоря. При требующемся моменте вращения привода МИ рабочая точка расположена на внешней характеристике выпрямителя (механической характеристике двигателя, связывающая момент на валу со скоростью вращения п двигателя). Если такой точкой является, например, п\, то при снятии нагрузки скорость вращения двигателя возрастает, в связи с чем рабочая точка выпрямителя перемещается по характеристике влево. Это соответствует уменьшению тока двигателя. При минимуме тока преобразователь переходит в инверторный режим. В приводе появляется при этом тормозной момент. Для получения минимального времени торможения угол опережения Р инвертора постепенно увеличивается по мере снижения скорости генератора. Движение рабочей точки в режиме форсированного торможения проходит по зигзагообразной кривой (левая часть рис. 7.83, б), включающей пунктирные промежуточные участки и участки инверторных характеристик. При выполнении преобразователя по перекрестной схеме воз можно и изменение направления вращения двигателя (реверс). При этом изменяется настройка углов управления: в инверторе от углов р совершается переход на углы а, а в выпрямителе углы а заменяются углами р. § 7.17. ОСНОВНЫЕ ЭЛЕМЕНТЫ И КЛАССИФИКАЦИЯ АВТОНОМНЫХ ИНВЕРТОРОВ И ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ Совместное рассмотрение автономных инверторов и преобразователей частоты базируется на том, что в большом числе типов преобразователей частоты автономный инвертор входит в качестве основного звена (рис. 7.84, а). Другим звеном в таком преобразователе является выпрямитель, преобразующий переменный ток (однофазный или трехфазный) промышленной частоты в постоянный, которым питается инвертор. .Таким образом, при сочленении выпрямителя и инвертора достигается преобразование переменног тока одной частоты (обычно промышленной) в переменный ток другой (непромышленной) частоты. Наличие в составе преобразователя частоты двух звеньев, связанных между собой каналом постоянного тока, является основным классификационным признаком для такого рода преобразователей. Применяются преобразователи частоты и с непосредственной связью между системами (рис. 7.84, б). Автономные инверторы применяются и как самостоятельно действующее устройство, что имеет место тогда, когда в качестве источников мощности используются источники постоянного тока |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |