 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 Выражение (5.34) является расчетным для выбора типов транзистора VT1 и диодов демодулятора по максимально допустимому току. Из рис. 5.5, видно, что уже при В > 2 длительность фронтов напряжения идп рассмотренного ДПР становится меньше 10 мкс. При повышении частоты напряжения иоп до 20-30 кГц можно уменьшить т до единиц микросекунд, что соизмеримо с аналогичным параметром извест-  ных релейных электронных устройств. Длительность фронтов напряжения цдП реального ДПР (показана на рис. 5.5) свидетельствует о небольшом расхождении значений этого параметра, полученных теоретически и в реальном устройстве, в котором использованы следующие типы электроэлементов: транзистор VT1 типа Т КТ608Б, диоды КДЮЗА. Число витков обмотки положительной обратной связи wK, ускоряющей пере-магничивание магнитопро-вода трансформатора 77 и обеспечивающей режим переключений транзистора VT1, ориентировочно можно определить из выражения, приведенного на стр. 76. Более точно шк определяется по методике расчета феррит-транзисторных ячеек (ФТЯ) (см., например, работу [36] или [37, с. 504]), так как схема рассматриваемого ДПР (см. рис. 5.2, а) принципиально не отличается от схем запоминающих ФТЯ в отношении способа обеспечения режима перемагничивания магнитопровода трансформатора 77. Способ питания транзистора VT1 выпрямленным напряжением Ыоп прямоугольной формы и включение нагрузки в цепь переменного тока для обеспечения фазочувствительности рассматриваемого ДПР практически не вносят различий в электромагнит йые процессы указанных устройств. Если для дискретных ДПР наиболее важными являются требования большой кратности изменения выходных сигналов ЧЭ при воздействии на них поля сигнального элемента и большой крутизны фронтов выходных сигналов, то аналоговые ДПР должны обеспечить высокую точность воспроизведения задан-86 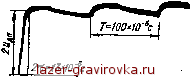 Рис. 5.5. К расчету переходных процессов в индуктивном ДПР иых функциональных зависимостей. Это обусловлено тем, что аналоговые ДПР в основном используются в составе ВДПМ, где формирование напряжения на якорной обмотке двигателя осуществляется в соответствии с формой огибающей выходного напряжения датчика. Применяемые в качестве аналоговых ДПР бесконтактные вращающиеся трансформаторы имеют сложную конструкцию, а наличие в них кольцевого трансформатора увеличивает габариты, снижает надежность всего устройства и повышает мощность управления. 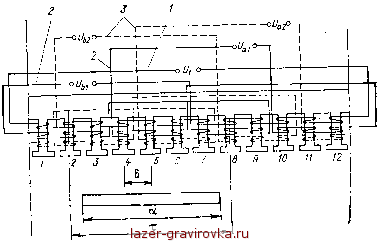 Рис. 5.6. Принципиальная схема двухфазного ДПР микросиниого типа В связи с этим представляет интерес ДПР микросиниого типа, позволяющий сочетать простоту конструкции, малые габариты и высокую точность воспроизведения синусной зависимости. При этом возможны многофазные и многополюсные варианты исполнения датчика [15, 16]. Отличительной особенностью конструкции такого ДПР по сравнению с традиционным микро-сином является выполнение магнитопровода статора с числом зубцов на полюс и фазу q, большим единицы. Ротор датчика представляет собой якорь из магнитомягкого материала. Выбором длины полюсной дуги ротора можно получить требуемую форму выходного сигнала: трапецеидальную, пилообразную (треугольную) и синусоидальную. Конструктивная схема двухфазного ДПР представлена на рис. 5.6. Обмотка возбуждения / датчика выполнена по схеме зубец - полюс , число ее секций равно числу зубцов магнитопровода статора. Секции фаз выходной обмотки 2 в пределах полюсного деления т соединены последовательно, что обеспечивает сложение наводимых в них трансформаторных ЭДС. Группы секций, расположенных на расстоянии полюсного деления, соединены встречно. При вращении ротора за счет изменения коэффициента взаимоиндукции между обмоткой возбуждения и выходной обмоткой напряжения в фазах последней Ua\, Ubi изменяются в функции угла поворота ротора в общем случае по трапецеидальному закону. В представленном варианте эти напряжения сдвинуты относительно друг друга на угол 90° эл. Одновременно на статоре датчика располагается дополнительная двухфазная обмотка 3 (показана штрихами), идентичная обмотке 2, но ее секции сдвинуты относительно одноименных секций фаз выходной обмотки 2 на угол, кратный зубцовому делению. Напряжения на выходе обмотки 3 Ua2, Um оказываются сдвинутыми по фазе относительно выходных напряжений обмотки 2 иа\, Ubi на угол Аф = рб, где б - угол между одноименными секциями основной выходной и дополнительной обмоток; р- число пар полюсов. Для рассмотренной на рис. 5.6 схемы ДПР Лф = 30° эл. Основная и дополнительная выходные обмотки работают поочередно в зависимости от направления вращения вала электродвигателя. Таким образом, рассмотренный ДПР позволяет получить одинаковые рабочие характеристики ВД при реверсе направления вращения вала при одновременном повышении КПД за счет сдвига между осями обмоток датчика и статора электродвигателя на угол Дф/2. Если длина полюсной дуги а ротора равна 90° эл., то выходной сигнал ДПР имеет треугольную форму, при а - 120° эл. - синусоидальную и при а = 180° эл. - трапецеидальную. Точность воспроизведения синусной зависимости выходного сигнала в функции угла поворота ротора при а - 120° эл. зависит от величины q и длины воздушного зазора в датчике. Оптимальным с учетом технологичности магнитопровода статора следует считать q=~3. С увеличением воздушного зазора возрастают поля рассеяния и одновременно уменьшается содержание высших гармоник в кривой выходного сигнала. Тем не менее, увеличение зазора приводит к снижению уровня выходного сигнала. Поэтому можно рекомендовать при конструировании ДПР рассмотренного типа задаваться величиной воздушного зазора в диапазоне 0,1-0,3 мм. Для увеличения точности целесообразно предусмотреть скос зубцов статора на пятую часть полюсного деления с целью подавления пятой гармоники в кривой выходного сигнала. При этом скос можно делать как на статоре, так и на роторе. Возможность получения выходного сигнала ДПР треугольной формы позволяет использовать его в ВД с дискретной коммутацией, в которых для формирования фронтов управляющих импульсов используются преобразующие устройства. В этом случае просто осуществляется регулирование ширины коммутационной зоны и широтно-импульсное регулирование путем изменения скважности импульсов, поступающих с выхода ДПР, при одновременном изменении амплитуды выходного сигнала. Достоинством рассмотренной конструкции ДПР является возможность реализации датчика практически любой фазности т и с любым числом пар полюсов р. Для ВД в плоском исполнении такая конструкция наиболее целесообразна, поскольку при значительных диаметрах расточки можно выполнить магнито-провод с большим числом зубцов и обеспечить q > 1 практически для любых сочетаний р и т. В тех случаях, когда наружный диаметр пакета статора ДПР ограничен условиями размещения в конкретном устройстве, выполнение многофазной конструкции с q > 1 невозможно по технологическим соображениям. Поэтому часто единственно возможной оказывается конструкция с q=l. Но даже и в этом случае получается выходное напряжение синусоидальной формы с малым содержанием высших гармоник. В качестве примера приведем основные технические данные ДПР с q = 1, у которого выходное напряжение отличается от синусной зависимости не более чем на 1,5%: диаметр расточки 48 мм; число зубцов статора 48; число пар полюсов 8; число фаз 3; воздушный зазор (односторонний) 0,12 мм; число витков катушки: обмотки возбуждения 50, выходной обмотки 115; амплитуда выходного сигнала 500 мВ; напряжение возбуждения 3,6 В; материал ротора - пермаллой 50Н; ротор нешихтованный; выполнен скос ротора на пятую часть полюсного деления. В основе расчета обмоточных данных ДПР при известной геометрии магнитопровода статора лежит зависимость выходного напряжения от напряжения возбуждения [15] ц J ,т J0OK Л, Ual ~ т Ul шГк о'Л, + 8Л2 где т - число фаз; wlK, waK - число витков в катушках обмотки возбуждения и выходной обмотки соответственно; Ai - магнитная проводимость воздушного зазора под зубцом; Лг - магнитная проводимость рассеяния паза; U\- напряжение обмотки возбуждения; а' = а/т. Данная зависимость получена без учета магнитных сопротивлений участков со сталью и краевых эффектов; тем не менее, для практических целей она дает удовлетворительные результаты с погрешностью не более 10-15 %. В качестве преобразующих устройств (ПУ) аналоговых ДПР используются схемы фазочувствительных выпрямителей (ФЧВ) в сочетании с широтно-импульсными модуляторами (ШИМ). В функции ФЧВ входит выделение огибающей выходного сигнала ДПР, которая преобразуется в ШИМ в последовательность прямоугольных импульсов, управляющих силовыми ключами коммутатора. На рис. 5.7 приведена принципиальная схема ПУ, реализованная в схеме коммутатора ВДПМ. Выходной сигнал одной из фаз ДПР подается на вход фазы А и через резисторы R5- R14 поступает на ФЧВ, собранный на микросхеме D2 (К574УД2). Туда же с целью синхронизации работы ФЧВ подается опорное напряжение частотой F0 с генератора прямоугольных импульсов (ГПИ), которое осуществляет одновременно питание обмотки возбуждения ДПР. Фазочувст-вительный выпрямитель выделяет огибающую выходного сигнала ДПР, причем на выходах 2 и 7 микросхемы D2 имеем идентичные по форме, но сдвинутые относительно друг друга на 180° эл. напряжения. Напряжение с ГПИ на вход ФЧВ подается через резисторы Rl - R4 и транзисторную сборку D1 (1НТ251А). В формирователе (ШИМ) D3, выполненном на микросхеме К574УД2, происходит сравнение положительной полуволны сигналов с ФЧВ с пилообразным напряжением, подаваемым на 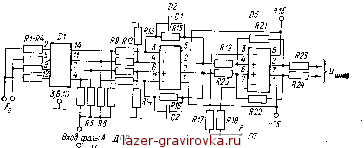 Дпр Рис. 5.7. Принципиальная схема ПУ аналогового ДПР входы 5 и 7 формирователя D3. Длительность импульсов на выходе ШИМ пропорциональна амплитуде выходного сигнала с ФЧВ. При этом фронт формируемого импульса соответствует моменту прихода очередного импульса с генератора пилообразного напряжения (ГП) на входы 5 и 7 формирователя D3. Момент совпадения значений выходного напряжения ФЧВ и пилообразного напряжения соответствует срезу импульса на выходе ШИМ. Таким образом, на выходе 2 формирователя D3 имеем последовательность импульсов, сформированных в соответствии с формой положительной полуволны, а на выходе 7 - в соответствии с формой отрицательной полуволны огибающей напряжения с ДПР. С выхода ШИМ через резисторы R23 и R24 последовательность импульсов подается на усилитель мощности (УМ). На рис. 5.7 изображена принципиальная схема ПУ, формирующего напряжения ишчк для управления силовыми ключами УМ одной из фаз электродвигателя. ПУ другой фазы выполнено по аналогичной схеме. Частота коммутации ШИМ, определяемая частотой F, обычно лежит в пределах 3-10 кГц. Если аналоговый ДПР рассмотренной конструкции используется в ВД с дискретной коммутацией, то ПУ в этом случае существенно упрощается. Выходной сигнал с ФЧВ поступает на пороговое устройство, где сравнивается с напряжением уставки. В результате на УМ поступают импульсы заданной длительности. Меняя напряжение уставки, можно изменять ширину коммутационной зоны. При этом на выходе ДПР желательно иметь пилоообразный сигнал, что достигается выполнением сигнального элемента на роторе с полюсной дугой, равной 90° эл. 5.2. Полупроводниковые ключи коммутатора При рассмотрении функциональной схемы ВД отмечалось, что полупроводниковые ключи (ПК) коммутатора осуществляют коммутацию секций якорной обмотки электрической машины по сигналам ДПР. Поэтому уровень допустимых для них токов и напряжений определяется мощностью разрабатываемого электродвигателя. Достижения в области силовой электроники, проявившиеся в серийном освоении отечественной промышленностью мощных силовых транзисторов КТ834А, Б, ТК235-63-3-2, 2ТКД155-40-6, рассчитанных на токи 15-50 А и напряжения до 600 В, позволяют уже в настоящее время создавать ВД мощностью от единиц до десятков киловатт. Для обеспечения высоких энергетических показателей ВД их полупроводниковые ключи должны работать в режиме переключений. В этом режиме сопротивление эмиттерно-коллекторного перехода транзистора ПК под действием сигналов ДПР изменяется скачком от очень большого значения (десятки мегом в режиме отсечки) до очень малого (сотые доли ома в режиме насыщения). Благодаря отмеченным свойствам потери в полупроводниковых ключах в режиме переключений небольшие, что создает предпосылки для экономичного преобразования энергии в ВД. К полупроводниковым ключам исполнительных ВД предъявляется ряд особых требований, вытекающих из условий работы приводов роботов. Так как приводы работают в условиях изменения температуры в широком диапазоне, то ПК должны обладать достаточной температурной стабильностью. Ко входу ПК в ВД подключаются выходные зажимы ДПР. Если под действием факторов окружающей среды входное сопротивление ПК будет изменяться в широких пределах, то соответственно будет изменяться выходной ток ДПР. Последнее может привести к нарушению режима насыщения транзисторов ПК и их повышенному нагреву. Устранить указанный недостаток можно путем выполнения ДПР в виде датчика тока, внутреннее сопротивление которого во много раз больше входного сопротивления ПК. Однако такой путь приведет к большим потерям мощности в ДПР. Более ра- |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |