 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 11 [ 12 ] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 ров в ВД с позиционной модуляцией фазных напряжений при работе его на участке 6М„ механической характеристики. Для получения расчетных выражений в дополнение к допущениям, принятым выше при рассмотрении электромагнитных процессов в ВДПМ, положим, что индуктивная связь между обмотками /-/ и 2-2 идеальная, т. е. коэффициент связи равен единице. Это облегчит нахождение граничных условий на границах коммутационных интервалов. Обратимся к рис. 4.8, где представлена форма тока в обмотках двигателя на га-м коммутационном интервале. Уравнения для токов на участках, где параметры силовой цепи неизменны, имеют вид hp di Ln di . U - е[п] U + е [п] (4.12) 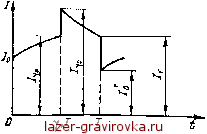 где Lp - индуктивность последовательно соединенных обмоток 1-1 и 2-2; гр - активное сопротивление силовой цепи на интервале (0, упТ); Ln, Гц -соответственно индуктивность обмотки 1 - / и активное сопротивление силовой цепи на межкоммутационном интервале. Поскольку в моменты времени / = упТ и t = Т изменяется число витков обмотки, подключаемой к источнику питания (в интервале (0, упТ) работают обе обмотки /-/ и 2- 2, а в интервале (упТ, Т) - только обмотка /-/), то при коммутации транзисторов происходят скачки тока 1У -* 1Уо и 1Т -* IQ. Связь между ними найдем из условия постоянства по-токосцеплений обмоток /-1 и 2-2 до и после коммутации: Iyo = kyIyn; Iq = j~It, где ky = Lp/Lu. Для граничных условий t~0, i ние уравнений (4.12) имеет вид Рис. 4.8. К расчету тока секционированием обмотки (4.13) :/о'. t = ynT, i = Iyn реше- 1т О уп)т т Гп U + е[п] (4.14) (4.15) где Тр = Ьр/гр; Тп = Ln/zn. С учетом равенств (4.13) выражение (4.15) после тождественных преобразований запишется так: 7;=(/Yn + i)e-r iw, (4.16) где ry = ruky; Ту = -- = ~- у у По виду выражения (4.15) можно сделать вывод о том, что рассматриваемая система с параметрами Гц, L\\ на межкоммутационном интервале эквивалентна цепи с параметрами ry, Ly при граничном условии t = ynT\ i = Iyn. Таким образом, расчет ВД с секционированием обмотки при симметричном способе коммутации силовых транзисторов мостового инвертора может быть сведен к расчету импульсной системы с переменными, скачкообразно изменяющимися параметрами непрерывной части Lp, гр и LY, rY соответственно на интервалах (0, упТ) и {упТ, Т). В работе [32] рассмотрен ВД как импульсная система с переменными параметрами. Выражения для расчета тока в двигателе получаются в этом случае достаточно громоздкими и предполагают использование вычислительной техники. Для инженерных задач, связанных с проектированием ВД с переменной структурой, целесообразно свести их расчет к расчету непрерывной системы по первой гармонике приложенного напряжения, перейдя к эквивалентным параметрам. В работе [32] получены условия такого перехода. Эквивалентные параметры силовой цепи определяются по формулам: Рэкв Р ср> Гдкв г1ср> kcp = a + QC(l -а); а = р /р', где С - отношение среднего значения огибающей функции у (п), определяющей закон позиционной модуляции, к ее амплитуде; В', р - отношение периода коммутации ШИМ к электромагнитной постоянной времени силовой цепи на интервале коммутации, где параметры цепи неизменны. Применительно к ВД с секционированием обмотки запишем Тг , Гг Trv Я - L ь 8 = -- В - - НэКВ 7 xpi V I > H 7 > *p up *-y откуда найдем эквивалентные параметры: Trp Lp -экв== ~а ~й > гэкв гпср- (4-17) Рэкв ср v Расчет ВД тогда можно вести по формулам (3.1) - (3.6). Погрешность в определении амплитуды тока при этом не превышает 5%, а разность фаз первых гармоник тока для переменных и эквивалентных параметров силовой цепи составляет менее 2 %. Перегрузочная способность. Использование принципа секцноинроваиня обмотки дает возможность наряду с приданием ВД свойств коллекторного электродвигателя с последовательным возбуждением повысить энергетические показатели в широком диапазоне изменения момента нагрузки иа валу н его перегрузочную способность. В электродвигателях мощностью свыше 100 Вт активное сопротивление обмотки соизмеримо с сопротивлением переходов силовых транзисторов коммутатора и составляет десятые доли ома. Пусковой момент ВД зависит, как известно, от активного сопротивления силовой цепи (или пускового тока), числа витков обмотки и магнитного потока индуктора: Ма = k<bw ~- г2 где r - rw + гд; rw - активное сопротивление обмотки; гл - сопротивление переходов полупроводниковых приборов и датчиков тока, включенных в силовую цепь последовательно с обмоткой. Найдем соотношение между пусковым моментом двигателя с секционированием обмотки (см. рис. 4.7,6) Л1 и пусковым моментом Mni двигателя имеющего только одну обмотку / - /. Для каждого из них запишем Мп = кФ (wu + W22)--Т- , мт =Фк>11 - rwn т rwn г гл Л Примем гд гШп, что соответствует реальным соотношениям параметров ВД. Рассмотрим также ВД с диапазоном изменения частоты вращения 1 : 3, в котором реализуется механическая характеристика, близкая к линии равной мощности. Это определит соотношение между частотами вращения в режиме холостого хода fio/fii = 3/1 и соответственно между числами витков обмоток 1 - 1 и 2 - 2: (wu + и>22)/о>н = 3. Полагая, что обмотки 1 - 1 и 2 - 2 намотаны проводом одинакового сечения, при условии равенства магнитных потоков после тождественных преобразовании получим Mn = M~; Ма1=М-±, (4.18) где М-кФи----пусковой момент ВД с идеальными ключами комму- татора, сопротивление переходов которых в насыщенном состоянии равно нулю. Из соотношений (4.18) следует, что пусковой момент ВД с секционированием обмотки в 1,5 раза больше пускового момента M i. При этом пусковой ток снизился в два раза. В точке б механической характеристики (см. рис. 4.7, б) при переходе на нижнюю ветвь гиперболической кривой ток, потребляемый двигателем, снижается, что приводит к повышению КПД и перегрузочной способности не только по моменту нагрузки, но и по потребляемому току. ВД с секционированием обмотки благодаря реализации режима постоянной (с известной степенью точности) мощности на валу и улучшенным пусковым и энергетическим характеристикам могут быть рекомендованы для приводов электромобилей, транспортных роботов, сверлильных автоматов, роботов, где требуется по условиям технологического процесса перемещение рабочего органа на значительные расстояния при минимуме времени пробега. Глава 5 УЗЛЫ И ЭЛЕМЕНТЫ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ 5.1. Датчики положения ротора Датчик положения ротора (ДПР), являясь в ВД элементом позиционной обратной связи, служит для создания сигналов, несущих информацию об относительном положении магнитных осей индуктора (ротора) и якорной обмотки (статора) электрической машины. Информационными признаками сигналов ДПР могут быть амплитуда их напряжения или тока, полярность (знак) или относительная длительность импульсов. ДПР, информационными признаками сигналов которых являются амплитуда или полярность напряжения, выдают команды только на включение или выключение соответствующего полупроводникового ключа при вполне определенном дискретном положении индуктора относительно якоря. Если информационным признаком сигналов ДПР является относительная ширина импульсов, то он кроме отмеченной выше функции регулирует напряжение, подаваемое на якорную обмотку, в зависимости от текущего (аналогового) значения угла между осями индуктора и якоря. В соответствии с указанными признаками все применяемые в вентильном двигателе ДПР делятся на две группы: дискретные и аналоговые. Разработчики дискретных ДПР стремятся так сконструировать все его узлы, чтобы сигнал или его огибающая на выходе чувствительных элементов как можно больше приближались к прямоугольной форме, необходимой для обеспечения режима переключений полупроводниковых ключей коммутатора. При этих условиях функции преобразующих устройств (ПУ) дискретных ДПР сводятся к усилению по мощности или выделению огибающей сигналов чувствительных элементов. ПУ в этом случае представляют собой простые функциональные узлы: выпрямители, усилители-ограничители или демодуляторы. При разработке аналоговых ДПР стремятся реализовать с помощью сигнального и чувствительных элементов с наибольшей точностью заданную (чаще всего синусоидальную) функциональную зависимость амплитуды выходных сигналов от текущего углового положения ротора. В функции ПУ аналоговых ДПР входят преобразование аналоговых сигналов в импульсы прямоугольной формы, относительная длительность которых пропорциональна амплитуде сигналов на выходе чувствительных элементов, и усиление сформированных импульсов по мощности. Более сложные функциональные зависимости, реализуемые аналоговыми ДПР, предопределяют их более высокую кон- структивную сложность. Поэтому их применяют преимущественно в специальных ВД (ВДПМ), в которых предъявляются повышенные требования к величине пульсаций вращающего момента. Наибольшее применение в настоящее время нашли индуктивные, гальваномагнитные и фотоэлектрические ДПР. Название датчиков определяется названием используемых в них чувствительных элементов (ЧЭ). В индуктивных ДПР в качестве ЧЭ используются миниатюрные дроссели и трансформаторы, подмагничиваемые постоянными магнитами сигнального элемента, а также ЧЭ машинного типа - микросины, вращающиеся трансформаторы и др. В качестве ЧЭ гальваномагнитных ДПР используются датчики Холла, магнитодисды, магниторезисторы и магнитотран-зисторы. В фотоэлектрических ДПР применяются фотодиоды, фоторезисторы, фототранзисторы, фототиристоры. В ВД робототехннческих средств необходимо использовать такие типы ДПР, которые наиболее полно удовлетворяют комплексу следующих эксплуатационно-технических требований: отсутствие подвижных электромеханических контактов; малые габариты и энергопотребление; высокая стойкость к действующим внешним факторам окружающей среды (климатические факторы, вибро- и ударные нагрузки и др.); высокая надежность; независимость параметров выходных сигналов от частоты вращения ротора ВД; большая кратность изменения выходных сигналов ЧЭ при воздействии на них поля сигнального элемента; большая крутизна фронтов выходных сигналов; высокая точность воспроизведения заданных функциональных зависимостей; относительно большой выходной ток (десятки и сотни миллиампер) и малое внутреннее сопротивление. Наиболее полно удовлетворяют перечисленным требованиям индуктивные ДПР с дроссельными или трансформаторными ЧЭ /рис. 5.1, а) [9]. Индуктивность обмоток дросселей насыщения и трансформаторов таких датчиков можно изменять в широких пределах путем подмагничивания их магнитопроводов магнитным полем постоянного магнита сигнального элемента (СЭ). Под действием вращающегося СЭ магнитная проницаемость материала магни-топровода, а следовательно, и индуктивность ЧЭ будут изменяться периодически с частотой вращения СЭ. Изменение индуктивности ЧЭ вызовет соответствующее изменение его индуктивного сопротивления при наличии переменного напряжения и„ на входе датчика. При этом на выходе ДПР (на выходной об- мотке согласующего трансформатора Т) появляются электрические сигналы цчэ, модулированные частотой вращения ротора ВД. Так как полупроводниковые ключи коммутатора должны быть открыты все время на протяжении угла рс, то очевидна необходимость выпрямления напряжения ичэ при помощи выпрямителя В (рис. 5.1, а). Сигналы индуктивного ДПР цдп после выпрямления имеют вид, показанный на рис. 5.1, д. Питание переменным напряжением ив индуктивных ДПР осуществляется 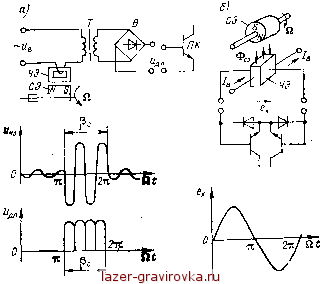 Рис. 5.1. Узлы и элементы коммутаторов ВД-. о -ДПР с трансформаторными ЧЭ; б - ДПР с датчиками Холла от вспомогательного статического преобразователя постоянного напряжения в переменное, входящего в состав ВД. Частота изменения напряжения ив выбирается достаточно высокой (10--100 кГц) для уменьшения габаритов ЧЭ и других реактивных элементов, входящих в состав ДПР. На рис. 5.1,6 приведена схема ДПР с датчиком ЭДС Холла, представляющим собой полупроводниковую (Si, GaAs) прямоугольную пластинку. Датчик Холла помещается в магнитное поле СЭ так, чтобы оно пронизывало одну пару противоположных граней пластинки. К другим противоположным граням подводится постоянный ток возбуждения /в. Тогда на противоположных гранях, расположенных в плоскости, перпендикулярной четырем предыдущим граням, появится ЭДС Холла ех, которая определяется выражением где kx - коэффициент Холла; Фсэ - магнитный поток СЭ. |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |