 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 [ 11 ] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 Подставляя равенства (4.4) и (4.5) в (2.9), получим выражение для участка вг механической характеристики ВД с изменяемой структурой (см. рис. 4.2) при Q = const: тш = CJns [(sin а) + (cos a) г|з2] - -~ [(sin2 a) Ц>, + (cos2 a) гр2]. Среднее значение момента ВД на участке вг я/2 я/2-arc/sin u/v Mcp=;CJns+ jj sinada + --CM/ns J cos a da - arcsin и/v 0 s>2r\ n/2 л/2-arcsin u/v ---Б- \ sin2aaa--См-б- \ cosaaa. arcsin u/v 0 После интегрирования и упрощения получим 4 Я -2 arcsin u/v С2 / и Mcp = - CJnssm-2--7Q(It-2arcsinT + + sin 2 arcsin . (4.6) При ри. с = я/2 выражение (4.6) превращается в выражение для механической характеристики ВД с параллельным подключением секций и рс = я/2: 2д/2 2 +я С2 а при р„. с = л (этот случай для ВД с изменяемой структурой возможен только при й = оо) -в выражение для механической характеристики ВД с параллельным подключением секций и рс = я: 4 С2М Mcp = - CJns---Q. Деля левую и правую части выражения (4.6) на - CM/ns и учитывая (4.2), получим выражение для механической характеристики ВД в относительных единицах: H -==sin-%-4-v(p .c + s!npH.c). (4.7) Выведем выражение для механической характеристики ВД с изменяемой структурой на участке ва. Так как на участке во работа ВД с изменяемой структурой характеризуется режимом 2, а на участке ба -режимом 1, то момент на валу электродвигателя при этом будет определяться суммарной механической характеристикой ВД с параллельным подключением сек- ций (4.7) и последовательным подключением секций: 6=Sin--4-v(P .c+sin ри.с) + Я/4 Я/4 -4- (sin а + cos а) da - -- v (1 +sin 2а) da Р„.с/2 Ри.с/2 для ри. с < я/2. Вводя логическую функцию г|э, можно написать общее выражение для механической характеристики ВД с изменяемой структурой: [ЯЧ -5- J (sin a + cos a) da -Ри.с/2 [it t 4- \ Ри.с/ Я/4 J JLV (1 + sin 2a) da U, я e /2 J fW2 J где г|з = 0, если ри. с я/2; гр=1, если ри. с < я/2. Интегрируя последнее выражение, получим формулу для среднего момента ВД с изменяемой структурой: цср = sin Ц± - JL v (ри. с + sin ри. с) + [4 (-£ - sin + + -S-V---arcsin ----- v cos 8И с1 ф. (4.8) 2 я v я r J 4 Механические характеристики ВД с изменяемой структурой, построенные по выражению (4.8) при варьировании напряжением и пороговых устройств, представлены на рис. 4.5. Приравнивая правую часть выражения (4.8) нулю, можно получить неявную функциональную зависимость относительной частоты вращения в режиме идеального холостого хода ВД с изменяемой структурой от параметра и: я - 2 arcsin UlVa sin -2- v0----= 0. я - 2 arcsin--h sin 2 arcsin - v0 v0 Выведем выражение для КПД вентильного двигателя с изменяемой структурой. Для этого определим мощность, потребляемую ВД нз сети: Я/2 Я/2 2 иг С а 2 ESU Г . Рп =--- \ da---тг- \ sin ado + я Rs J я #s J arcsin u/v arcsin u/v я/2-arcsin и/v я/2-arcsin u/v ,2 c/2 Г 2 ESU Г , , 4---=г- \ aa----- \ cos a da + [Я/4 Я/4 Я/4 т 2 С/2 Г , 2 ESU f . , 2 £s<7 Г ,1, --- \ da----я- \ sin a da----£- \ cos a da lib. я Rs J n Rs J я tfs J I После интегрирования и упрощения получим = ~б- I 1--arcsm - I----- cos arcsin--f- Rs V я v ) я D r tlP я-2Ви,с 2 £sf7 ( . JV, T IRs 2я + я Rs lsm 2 - 2 (4.9) Выражение для электромагнитного КПД вентильного двигателя, учитывающего только потери в меди секций якорной обмотки, имеет вид (4.11) Подставляя в уравнение (4.10) значение Рэм из (2.9), используя выражение (4.8) и Рп из (4.9), получим т, = {v sin - -i- v (P . с + sin p . c) + [1 (u - v sin + -\-\r v2--- v2 arcsin ----- vz cos ри. cl -Л X Z Я V Я J J w( nJ / , 2 . u\ и , Г я2 ( я - 2РИ. с Л , х { Т (1 - Тarcsm V J - v cos arcsm 7 + lie -1 2я J + b--Pc.j]1j3J 1. (4.11) + ~ v ( sin - cos На рис. 4.6 представлены построенные по выражению (4.11) кривые зависимости ц = f(v), которые свидетельствуют о высоких энергетических показателях ВД с изменяемой структурой.
0,8 0,6 0,4 0,2 О 0,2 Ofi 0,6 0,8 1,0
0,2 0,4 0,6 0,в 1,0 v -- Рис. 4.5. Расчетные механиче- Рис. 4.6. Кривые КПД вентильного дви-ские характеристики ВД при гателя с изменяемой структурой параллельном (1) и последо- , вательном (2) подключении . секций к источнику питания Из графиков видна важная особенность ВД с изменяемой структурой - наличие двух экстремумов (максимумов) в кривой КПД. Максимум КПД, расположенный в области больших частот вращения ротора, принадлежит двигателю с чисто параллельным подключением секций к источнику питания, схема которого обеспечивает изменение угла сигнального сектора р\ в функции частоты вращения (большие значения р% соответствуют большим частотам вращения, а меньшие - меньшим). Максимум КПД, расположенный в области частот вращения ротора, принадлежит двигателю с чисто последовательным подключением секций к источнику питания (на рис. 4.6 эта кривая обозначена штриховой линией). Смещение его в область малых частот вращения обусловлено увеличением в два раза коэффициента Се электрической машины после изменения структуры - перехода двигателя от параллельного подключения секций к последовательному. Указанные особенности обеспечивают высокие энергетические показатели ВД с изменяемой структурой энергопреобразующего узла в широком диапазоне рабочих частот вращения. 4.4. ВД с секционированием обмотки Алгоритм работы ВД. Расширить диапазон частот вращения, соответствующих участку мягкой механической характеристики, по сравнению с ВД с изменяемой структурой возможно, если при коммутации обмоток электродвигателя число витков будет изменяться не в два, а в заданное (больше двух) число раз. VD2 Ш \VT4 УВв % Г. 2 2 Ю7Ж Рис. 4.7. ВД с секционированием обмотки: а - принципиальная схема одной из фаз; б- механическая характеристика 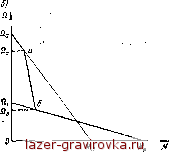 На рис. 4.7, а изображена схема силовой части коммутатора одной из фаз ВД, реализующего указанное требование [30]. На статоре электродвигателя расположены соосно две двухфазные обмотки с числом витков в фазе соответственно шц и w22. Вид механической характеристики такого ВД представлен на рис. 4.7, б. Порядок работы двигателя следующий. На участке механической характеристики QQa6 работает обмотка /-/, ток в которой коммутируется транзисторами VT1-VT4, причем участок аб характеристики соответствует режиму ограничения потребляемого двигателем тока. В точке б по сигналу с датчика частоты вращения последовательно с первой включается обмотка 2-2. Ток в последовательно соединенных обмотках /-/ и 2-2 на участке 6М„ механической характеристики коммутируется транзисторами VT1, VT2, VT5, VT6. Транзисторы VT3, VT4 при этом запираются. Стабилитроны VD6 и VD8, включенные последовательно с обратными диодами VD5 и VD7, препятствуют замыканию ЭДС вращения, наводимой в обмотке 3 Зак. 976 2-2 при работе ВД в диапазоне частот вращения Q0 - (участок Qq6 механической характеристики). Соотношение чисел витков w\\ и W22 определяет диапазон частот вращения, в котором реализуется режим постоянной мощности на валу. Точка а, в которой ВД переходит в режим ограничения потребляемого тока, выбирается из условия наилучшего приближения характеристики к линии равной механической мощности. Таким образом, использование принципа секционирования обмотки ВД позволяет придать ему свойства коллекторного двигателя с последовательным возбуждением. В мостовых схемах возможны симметричный и несимметричный законы переключения силовых транзисторов [22]. При симметричном способе переключения транзисторы одной диагонали моста управляются одинаковыми знакопеременными импульсами. Управляющие напряжения на базах транзисторов второй диагонали моста имеют обратную полярность. Состоянию равновесия в мостовой схеме соответствует относительная продолжительность включения транзисторов у = 0,5, когда среднее напряжение на обмотке двигателя равно нулю. В межкоммутационном интервале имеет место режим рекуперативного торможения. Для симметричного способа коммутации характерны повышенный уровень пульсаций тока в обмотке двигателя и соответственно более высокие пульсационные потери в меди. Рассмотрим работу силовой схемы коммутатора при работе ВД на участке 6М„ механической характеристики на одном из коммутационных интервалов. Пусть к началу коммутации ток в обмотках двигателя имел направление, указанное стрелками на рис. 4.7, а. В момент коммутации транзисторы VT1, VT6 закрываются, a VT2 и VT5 открываются. Энергия, запасенная в электромагнитном поле обмоток /-/ и 2-2 к началу межкоммутационного интервала, благодаря тому что коэффициент связи между обмотками близок к единице, частично рассеится на активном сопротивлении обмотки /-/ и диодах VD2, VD3, частично преобразуется в механическую энергию и частично рекуперируется. При этом, если ток в последовательно соединенных обмотках /-/ и 2-2 коммутируется транзисторами VT1 и VT6, то в межкоммутационном интервале к источнику питания через диоды VD2 и VD3 оказывается подключенной лишь обмотка -/. Таким образом, при работе двигателя на участке 6М„ механической характеристики при коммутации транзисторов происходит скачкообразное изменение параметров силовой цепи, причем изменяется не только активное сопротивление, но и суммарная индуктивность цепи. Из-за рассеяния коэффициент связи ежду обмотками /-/ и 2-2 меньше единицы, поэтому в момент коммутации тока в обмотке 2-2 возникнут перенапряжём ния, для снятия которых параллельно транзисторам VT5 И VTo включены стабилитроны VDo и VD8. т При несимметричном способе переключения силовых транзисторов положению равновесия в системе соответствует относительная продолжительность включения одного из нижних транзисторов у = 0. В различные интервалы времени имеют место следующие состояния силовой цепи: обмотка двигателя включена в цепь источника питания; обмотка двигателя замкнута накоротко с помощью одного из верхних транзисторов и диодов моста (осуществляется режим динамического торможения). Обратимся к рис. 4.7, а. В один из полупериодов выходного напряжения с ДПР, когда транзистор VI6 открыт, a VT1 и VT2 коммутируются в соответствии с законом ШИМ, динамическое торможение в межкоммутационном интервале осуществляется в контуре: транзистор VT6, обмотки 2-2, 1-/, диод VD2. При этом параметры силовой цепи в моменты коммутации не изменяются. В следующий полупериод выходного напряжения с ДПР, когда открыт транзистор VT2, а по закону ШИМ коммутируются транзисторы VT5 и VT6, режим динамического торможения осуществляется замыканием накоротко обмотки /-/ через транзистор VT2 и диод VD4, т. е. имеет место скачкообразное изменение параметров силовой цепи, как при работе двигателя в случае симметричного закона управления. Таким образом, изменение структуры силовой цепи происходит лишь в один из полупериодов выходного напряжения с ДПР, а в течение другого полупериода параметры силовой цепи неизменны. Это явление эквивалентно несимметрии напряжения питания в разные полупериоды напряжения с ДПР, что может привести в конечном итоге к низкочастотным колебаниям мгновенной частоты вращения вала ВД и снижению его КПД. Устранить указанные недостатки можно заменой последовательно включенных диода и стабилитрона (VD5, VD6 и VD7, VD8 на рис. 4.7, а) транзисторными ключами с односторонней проводимостью [31], которые при работе ВД на участке 6МП механической характеристики открыты и выполняют роль обратных диодов в мостовой схеме, а на участке Q0a6 механической характеристики закрыты. Управление ими осуществляется по сигналу с датчика частоты вращения. Схема коммутатора ВД в этом случае получается несколько сложнее. Поэтому выполнение силовой части коммутатора в соответствии со схемой рис. 4.7, а, несмотря на присущие ей недостатки при симметричной коммутации транзисторов, может быть рекомендовано для ВД небольшой мощности, характеризующихся малым индуктивным сопротивлением обмоток по сравнению с активным. Электромагнитные процессы. При коммутации транзисторов в схеме рис. 4,7, а происходит скачкообразное изменение пара* метров силовой цепи. Поэтому расчет тока в обмотке двигателя целесообразно вести методом припасовывания, составляя дифференциальные уравнения на каждом коммутационном интервале. Рассмотрим случай симметричной коммутации транзисто- |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |