 |
(495)510-98-15
|
|
Меню
|
Главная » Производство комплектующих для высокотехнологичных процессов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [ 51 ] 52 53 54 ществляется сканирование точек коррекции диагональных контактных площадок кристалла, характеризующих его положение. Блок управления ПЗС преобразует полученную видеоинформацию с матрицы ПЗС в цифровую форму. ЭВМ обрабатывает ее, определяет положение точек коррекции, находит смещение и разворот кристалла относительно эталонного положения и корректирует эталонный алгоритм сварки. Затем все необходимые проволочные перемычки привариваются в автоматическом цикле. После сварки микроЭВМ выдает команду на замену прибора, ИС высвобождается, снимается с рабочего столика и на ее место подается новая ИС. Помимо системы технического зрения робот имеет систему электрического контроля качества микросварки. При этом контактные площадки кристалла электрически соединяются через внешние выводы с корпусом установки, а сварочная головка изолируется от него. После приварки проволоки к контактной площадке кристалла и подъема сварочной головки наличие контакта между ней и корпусом говорит о том, что процесс прошел правильно и сварку можно продолжать. После присоединения проволоки к выводу корпуса и ее обрыва контакта между головкой и проволокой не должно быть. Невыполнение перечисленных условий говорит о нарушении процесса сварки. При этом включается сигнализация, под перекрестье проектора автоматически подводится первая точка сварки, на которой произошел сбой, и процесс работы робота приостанавливается. Робот оснащен также специальным контрольным телевизионным монитором 5, позволяющим наладчику вести оперативный визуальный контроль качества микросварки на дополнительной позиции автоматического транспортного тракта, куда прибор ш> падает после сварки. Кроме того, на роботе может производиться выборочный контроль прочности сварных соединений. При этом сварочная головка нагружается нарастающим усилием, которое фиксируется в момент отрыва приваренной проволоки и обрабатывается ЭВМ, последняя выдает результаты статистического анализа. Применение адаптивных роботов ОЗУН-12000 МЗ для микросварки позволяет увеличить производительность труда и снижает уровень брака на данной операции. Один оператор-наладчик может проводить техническое обслуживание и замену выработанных кассет на 4 . .. 10 автоматах. Система управления роботами имеет специальный выход для подключения к центральной ТВ-системе, что позволяет организовать отдельный пункт для одновременного контроля их работы. Адаптивный микросварочный робот ЭМ-4060 предназначен для присоединения проволочных выводов из золота к контактным площадкам ИС методом термокомпрессионной сварки. Робот оснащен системой искусственного зрения, обеспечи- вающей, как и у описанного ранее робота ОЗУН-12000 МЗ, автоматическую коррекцию управляющего алгоритма в зависимости от индивидуальных погрешностей посадки кристалла в каждой обрабатываемой ИС. Развернутый линейный шаговый двигатель для двухкоорди-натного перемещения и поворота сварочной головки и использование электрического разряда для образования шарика на проволочке вместо традиционной водородной горелки позволили вдвое по сравнению с аналогами повысить производительность автомата. Робот оборудован системой автоматической диагностики основных функциональных устройств. Программирование скорости перемещения капилляра, автоматическая коррекция траектории перемещения при изменении высоты сварки и длины перемычки позволяют выполнять высокоскоростной монтаж при минимальном динамическом воздействии на свариваемые элементы. Предусмотрена возможность встраивания робота в гибкие производственные системы. Технические характеристики робота ЭМ-4060: Производительность........до 28 000 точек/ч Максимальные перемещения координатного стола по осям X н V.......... 20X20 мм Общая погрешность позиционирования, не более +0,015 Максимальное число монтируемых выводов . . 96 Время распознавания положения кристалла . . 0,6 с Допустимое смещение кристалла: по осям X и Y.........±0,3 мм по углу...........±5° Температура нагрева рабочего столика . , . 250...450 °С Разработаны технологические роботы и для монтажа кристаллов. Так, автомат присоединения кристаллов ЭМ-4085 (см. § 9.2) по своему уровню уже близок к интеллектуальным роботам, так как его система управления на основе информации, передаваемой оптико-телевизионной системой, принимает решение о том, является ли кристалл, подлежащий монтажу, годным. Годные кристаллы распознаются по отсутствию маркировочных пятен, трещин и сколов. КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Какова должна быть точность и грузоподъемность роботов для работы в чистых комнатах? 2. Назовите преимущества и недостатки пневмопривода, сферу его применения. 3. Какой привод применяют для манипуляторов ультрапрецизионных роботов? 4. Расскажите последовательность работы системы управления роботом РФ-202М по алгоритму рис. 11.15. 5. Какая элементная база и почему более всего подходит для систем управления роботами, предназначенными для работы в составе ГПС> У о. Сравните преимущества и недостатки систем управления на основе электромеханических командоаппаратов и микропроцессоров 7. Почему робот Электроника НЦТМ-01 называют адаптивным? е. к,ак осуществляется программирование робота ОЗУН-12000 МЗ какое оборудование, программируемое сходными методами, вы знаете? Глава 12 ГИБКИЕ ПРОИЗВОДСТВЕННЫЕ СИСТЕМЫ В МИКРОЭЛЕКТРОНИКЕ 12.1. ГИБКИЕ ПРОИЗВОДСТВЕННЫЕ СИСТЕМЫ - СРЕДСТВО ОБЕСПЕЧЕНИЯ ПРОГРЕССИВНОСТИ И ЭФФЕКТИВНОСТИ ПРОИЗВОДСТВА ИНТЕГРАЛЬНЫХ МИКРОСХЕМ Резкое ускорение темпов научно-технического прогресса привело к коренным изменениям в области производства микроэлектронных изделий. Особенно это касается производства больших (БИС) и сверхбольших (СБИС) интегральных схем, микропроцессорных наборов, приборов с зарядовой связью (ПЗС) и других приборов с высокой плотностью размещения элементов на кристалле площадью в несколько десятков квадратных миллиметров. За последние 10-15 лет на основных операциях производства СБИС сменилось не одно поколение технологического оборудования, внедрены принципиально новые технологические процессы (электронно- и ионно-лучевая литография, ионное травление и сухая технология литографии). И в таких условиях, в такой очередности технологий и оборудования для их реализации, при быстрой сменяемости объектов производства, их достаточно широкой номенклатуре и миллионной программе выпуска производство должно оставаться высокоэффективным. Не просто перевооружаться технически и технологически и поспевать за мировым уровнем, но и являться двигателем прогресса, генератором новых идей и технических решений. Производство должно быть прогрессивным и эффективным одновременно, т. е. быть эффективным в настоящий момент времени с учетом требований завтрашнего дня, сочетать наивысшую эффективность сегодня и возможность ее обеспечения завтра с учетом изменений программы выпуска, конструкций изделий, появления новых технологий и новых технических средств для их реализации. Но прогрессивность и эффективность производства не однозначные понятия. В качестве оценки эффективности производства используем критерий производительности общественного труда Пт, введенный Г. А. Шаумяном для оценки эффективности автоматизации: Пт=ЕПр/(Тп+ЕТж), где ЕПР - количество продукции, выпущенной технологическим комплексом за некоторый период эксплуатации; Тп - затраты овеществленного труда (стоимость элементов технологического комплекса); ЕТЖ - сумма затрат живого труда - затраты на зарплату, материалы, энергию и т. п. (текущие производственные затраты). Если комплекс обладает в течение некоторого периода эксплуатации производительность Qt и текущие затраты в единицу времени составляют Тжь производительность общественного труда при его эксплуатации в течение этого периода n,=Q1N/(T +T iN). (12.1) Наивысшая эффективность производства достигается, если: минимальна стоимость оборудования, т. е. прошлый труд Тп, затраченный на его создание; минимальны текущие затраты Тж, т. е. минимальны затраты на зарплату, потребление энергии, максимально использование материалов за счет высокой степени автоматизации, обеспечения высокого выхода годных изделий, применения безотходных ресурсе- и энергосберегающих технологий. После ввода комплекса в эксплуатацию производительность общественного труда постоянно растет в соответствии с формулой (12.1) и стремится к пределу, равному Qi/Tmi (рис. 12.1), т. е. любая техника не может обеспечить постоянный рост производительности труда и морально стареет. После некоторого периода эксплуатации Ni (рис. 12.1) необходима реконструкция комплекса, направленная на повышение производительности Q или сокращение затрат живого труда Тж. В процессе реконструкции производительность общественного труда может несколько снижаться за счет сокращения или прекращения выпуска продукции и возрастания затрат прошлого труда, направленного на реконструкцию. После реконструкции комплекс начинает работать с другими показателями Q2, Тп2 и Тж2 и снова обеспечивает рост производительности труда до величины (32/Тж2 (рис. 12.1). Именно производительность технологического комплекса и текущие затраты определяют его потенциальные возможности по росту производительности общественного труда; стоимость комплекса, затраты на реконструкцию и ее длительность определяют динамику роста этого показателя эффективности. Анализ эффективности производственной системы на достаточно длительном периоде существования показывает, что для обеспечения постоянного и достаточно быстрого роста производительности общественного труда, т. е. для обеспечения прогрес-20-6281 305 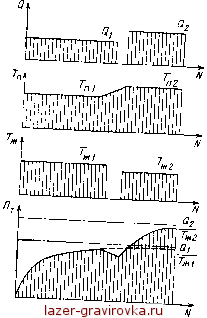 Рис. 12.1. Рост производительности общественного труда Пт при эксплуатации технологического комплекса в зависимости от изменения его производительности Q, затрат прошлого Т„ и живого Тж труда Рис. 12.2. Производительность об- Е 9Нпп° ТРУДЭ ТРаДИВДОНИОЙ 1 И гиокои 2 производственных систем 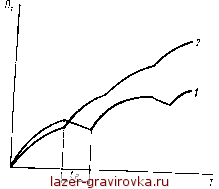 сивности, система должна быть организована так, чтобы не быть жестко привязанной к определенной программе выпуска изделий, к их конструкции, используемым технологическим процессам и реализующему их оборудованию. Прогрессивный технологический комплекс должен обладать некоторой избыточностью для быстрой реализации возможностей по наращиванию программы выпуска, необходимым запасом технологических функций для опробования и оперативного перехода на новые технологии и новые изделия. Всякая избыточность в настоящий момент времени приводит к снижению эффективности. Уберите ее - вы снизите стоимость технологического комплекса и повысите его мгновенную эффективность, однако завтра можете оказаться в затруднительном положении при изменении внешней ситуации. Чрезмерная избыточность приводит к резкому снижению эффективности, уменьшает отчисления на техническое перевооружение производства, так что тоже не полезна, а вредна даже с точки зрения прогрессивности. Прогрессивная производственная система должна быть организована так, чтобы иметь способность к постоянному развитию, производить перестройку без прекращения выпуска продукции. Революционные коренные перестройки в прогрессивной производственной системе должны быть заменены планомерными и подготовленными эволюционными преобразованиями, проводимыми в кратчайшие сроки. Для поддержания темпов роста 306 производительности общественного труда на должном уровне при эксплуатации производственной системы чрезвычайно важно вести техническую политику, основанную на результатах НИР, проводимых в рамках эксплуатации системы, обобщении мирового опыта и прогнозе развития отрасли. Результатом этой политики должен быть комплекс мероприятий, направленный на поддержание прогрессивности. При этом планирование и проектирование каждой перестройки производства должно вестись с учетом долговременного прогноза развития, целесообразно дробить перестройки и модернизации производства на ряд последовательных этапов, т. е. проводить динамическое проектирование эволюционных преобразований производства. В условиях быстрой сменяемости объектов производства и технологий чрезвычайно важно обеспечивать возможно более быструю перестройку производства. На рис. 12.2 показан рост производительности труда двух технологических комплексов. Первый комплекс с жесткой структурой, на его модернизацию и реконструкцию требуется некоторое время tp, в течение которого продукция не выпускается. Второй комплекс несколько дороже, это видно по менее интенсивному росту производительности труда на каждом этапе между реконструкциями, но за счет гибкой структуры перестраивается очень быстро. Как видно из графика, на достаточно длительном этапе эксплуатации гибкий живучий комплекс обеспечивает больший рост производительности общественного труда. Таким образом, прогрессивный технологический комплекс должен быть комплексно автоматизирован и иметь гибкую динамичную структуру, позволяющую: рационально, с соответствующим изменением текущих затрат изменять программу выпуска и осуществлять переход на другие изделия в кратчайшие сроки; проводить опробование новых технологий и нового оборудования в процессе нормальной эксплуатации без сокращения программы выпуска изделий; постоянно проводить поэтапную реконструкцию и модернизацию производства, т. е. обеспечивать живучесть комплекса и его эволюционное развитие в век научно-технической революции. При комплексной автоматизации производства, всемерном сокращении затрат живого труда и создании безлюдных производственных систем последние теряют свой самый гибкий элемент -человека. Перечисленным выше требованиям прогрессивности и эффективности в полной мере отвечают гибкие производственные системы, как итог комплексной автоматизации производства. Следует различать гибкость системы в тактическом плане как ее способность программными средствами переходить на обработку других изделий некоторого класса и гибкость в стратегическом 20* 307 |
|
© 2025 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |