 |
(495)510-98-15
|
|
Меню
|
Главная » Производство комплектующих для высокотехнологичных процессов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [ 29 ] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 на вход системы под давлением 0,4... 0,6 МПа (4... 6 атм.). Основные элементы пневмосистемы размещены внутри корпуса генератора; стабилизаторы воздуха 29 закреплены на стойках 17. Оптическая схема генератора изображений показана на рис. 7.8. Осветитель генератора ЭМ-559Б выполнен двухканаль- 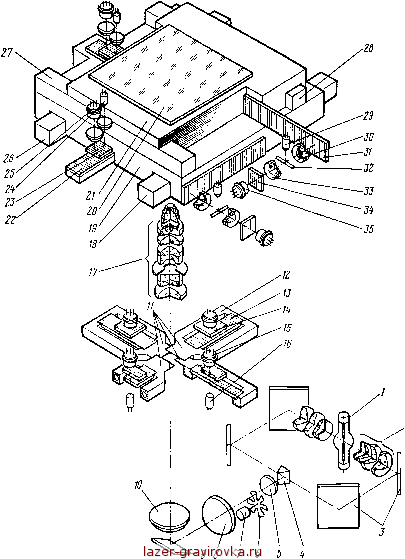 Рис. 7.8. Оптическая схема генератора изображений 170 ным. Изображение источника излучения 1 двумя коллекторами 2 передается на диэлектрические зеркала 3, которые наряду с высоким коэффициентом отражения (более 0,9) в области длин волн %= (436+20) нм обеспечивают высокое пропускание и соответственно отделение теплового излучения. Зеркала направляют поток излучения на призму 4 и далее через линзу 5 в плоскость затвора обтюраторного типа, который выполнен в виде крыльчатки 6, закрепленной на валу шагового двигателя 7. Затвор обеспечивает высокую стабильность времени срабатывания в диапазоне 0,05... 10 с с дискретностью 0,01 с. После затвора излучение через конденсор 8, зеркало 9 и линзу 10 поступает в плоскость диафрагмы, образованной четырьмя шторками 11. Каждая шторка 11 закреплена на подвижной каретке 12 и снабжена датчиком линейных перемещений (ДЛП) в виде установленной на каретке растровой линейки 13, над которой неподвижно закреплена растровая маска 14. Излучатель 16 закреплен под системой растров, а фотоприемник 15 над ней. При освещении растрового сопряжения параллельным пучком света возникают светлые и темные участки, которые, группируясь, образуют отчетливо видимые широкие муаровые полосы (рис. 7.9,а,б). В ДЛП используется свойство муаровых полос смещаться на значительное расстояние даже при незначительных перемещениях подвижного растра. Сформированное диафрагмой изображение наборного элемента попадает во входной зрачок объектива 17. Объектив Бинар-13-1 уменьшает изображение в 10 раз и строит его в рабочей плоскости заготовки ПФО 20, закрепленной рабочей поверхностью вниз на каретке 21 координатного стола. Контроль перемещения кареток 19 и 21 по направляющим 18, 26 и 27, 28 осуществляется двумя однотипными ДЛП. Каждый из них включает отражательную дифракционную решетку 22, соединенную с соответствующей кареткой, а также неподвижную прозрачную 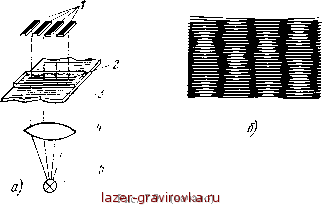 Прямой ход Обратный ход 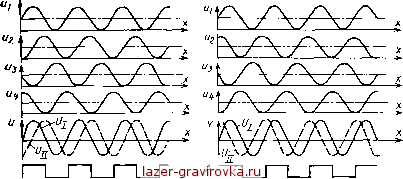 А А и П и П и П аЬ п и п и п Д 1 1 I I I I I I 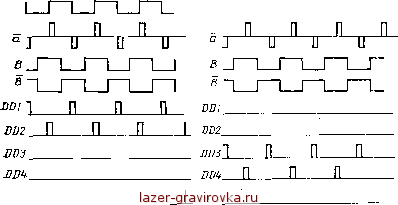 + 1 п п п п п п 1 п п п п п п низ л ал В аЛВ аЛВ аЛВ Рис. 7.9. Система контроля перемещений: а - схема счета муаровых полос: б- формирование муаровой картины; в - временная диаграмма преобраювания сигналов датчиков; г - структурная схема устройства счета муаровых полос дифракционную решетку 23, закрепленную в корпусе датчика совместно с источником света 24 и фотоприемником 25. При юстировке корпуса датчика обеспечивают параллельность плоскостей обеих решеток, а также разворот их штрихов на требуемый угол (около 10~4 рад). Излучение источника 24 преобразуется линзой в параллельный пучок лучей, которые дифрагируют на прозрачной дифракционной решетке 23. Пучки нулевого и первого порядков вторично дифрагируют на отражательной дифракционной решетке, а затем еще раз - на прозрачной. Накладываясь друг на друга, эти пучки формируют интерференционную муаровую картину, аналогичную показанной на рис. 7.9,6. Перемещение решетки на 1 мкм соответствует сдвигу муаровых полос на 10 мм, что легко фиксируется фотоприемниками. Контроль начальной установки положения кареток и периодический контроль работы координатного стола производится датчиками базы. В каждом из этих датчиков измерительная линейка 31, закрепленная на каретке, освещается параллельным пучком света, сформированным светодиодом 29, полупрозрачным зеркалом 32 и линзой 30. Изображение линейки 31 через полупрозрачное зеркало 32 и линзу 33 проецируется в плоскость растра 34. При перемещении линейки 31 ее изображение перемещается в плоскости растра 34, в результате на фотоприемник 35 проходит световой поток, зависящий от положения линейки. Точность работы ДЛП зависит не только от шага растра или дифракционной решетки и точности их изготовления, но и от способа отсчета муаровых полос и преобразования электрических сигналов фотоприемников в информацию об измеряемом перемещении. Для получения информации о величине и направлении перемещения используются различные устройства счета числа муаровых полос, схема одного из которых показана на рис. 7.9,а. В схеме используются четыре фотоприемника 1, на каждый из которых поступает световой поток от источника 5, проходящий через коллиматор 4, подвижный 3 и неподвижный 2 растры. Роль фотоприемников в генераторе изображений выполняют отдельные площадки четырехэлементного фотодиода. Эти площадки располагаются вдоль направления перемещения муаровых полос на расстояниях, равных 1/4 шага муаровой картины, что соответствует сдвигу фаз на я/2. Площадки фотодиода соединены между собой попарно через одну по разностной схеме через выходы своих предусилителей, преобразующих фототоки в напряжения Ui... U4. Такое включение фотоприемников позволяет исключить постоянные составляющие сигналов (рис. 7.9,в). В результате выходные сигналы датчика представляют собой два синусоидальных сигнала Ui и Un с нулевыми постоянными составляющими и одинаковыми амплитудами, причем эти сигналы различаются по фазе на я/2. Сигналы UT и Un поступают в формирователи DD3 и DD4 (рис. 7.9,г), представляющие собой после- довательное соединение триггера Шмитта и потенциального инвертора. Каждый формирователь имеет по два выхода. С одного выхода снимается прямоугольное напряжение с той же фазой, что и входной синусоидальный сигнал, а с другого - прямоугольное напряжение с фазой, сдвинутой на половину периода по отношению к первому. В результате на выходах формирователей DD3 h DD4 образуются четыре прямоугольных напряжения А, В, А, В, три из которых сдвинуты по фазе относительно каждого предыдущего на я/2. Для управления реверсивным счетчиком полос выходные сигналы А и А подаются на дифференцирующие цепи Д1 и Д2. Продифференцированные импульсы а и а поступают на соответствующие схемы совпадения DD1...DD4. На вторые входы схем совпадения подаются соответствующие сигналы группы В, В. Если измерительная растровая решетка 3 движется в прямом направлении, выходные импульсы схем совпадения вырабатываются на шине прямого хода и затем подаются на вход (+) реверсивного счетчика DD5. При обратном ходе измерительной решетки счетные импульсы появляются на шине обратного хода и затем подаются на вход (-) реверсивного счетчика. При перемещении решетки на один шаг на счетчик подаются два импульса, т. е. данное отсчетное устройство обладает разрешающей способностью, соответствующей 1/2 шага растра. Усложнением блока выработки счетных импульсов можно увеличить разрешающую способность отсчетного устройства в два и более раз. Основные технические данные генератора изображений ЭМ-559Б: Производительность при шаге перемещений по осям 1 мм, изменении наборного элемента иа 0,1 мм и вре мени экспонирования 0,15 с . Минимальный размер наборного элемента Максимальный размер наборного элемента Погрешность размеров наборного элемента Неровность края наборного элемента Размер рабочего поля координатного стола Погрешность позиционирования координатного стола ±6,5 мкм Масштаб проекционного уменьшения.....10:1 7000 экспоз./ч 4 мкм 3000 мкм ±(1,0. ..1,8) мкм не более 1 мкм ±(150X150) мм 7.3. ФОТОПОВТОРИТЕЛЬ ДЛЯ ИЗГОТОВЛЕНИЯ ЭТАЛОННЫХ ФОТОШАБЛОНОВ Фотоповторитель предназначен для проекционного переноса и мультипликации уменьшенного изображения топологии ПФО на заготовку ЭФШ. В качестве таких заготовок используются фотопластины со слоем светочувствительной эмульсии, а также металлизированные стеклянные пластины со слоем фоторезиста. Конструкция оптико-механического устройства фотоповторителя модели ЭМ-562 показана на рис. 7.10. При его проектировании широко использованы принципы унификации и блочного наращивания, поэтому компоновка фотоповторителя этой модели, конструкция ряда важнейших узлов аналогичны генератору изображений ЭМ-559Б. Фотоповторитель, как и генератор изображений, построен по бестубусной схеме. Его каркас образован плитой 23, четырьмя стойками 22, на которых закреплены стабилизаторы воздуха 28, и основанием 8. Объектив 7 неподвижно закреплен в основании 8, на котором смонтирован координатный стол для перемещения заготовки ЭФШ по координатам X и Y. Каретки 3 и 4 координатного стола перемещаются на аэростатических направляющих. Магнитоэлектрические приводы кареток содержат статор 9 в виде постоянного магнита и якорь 10. Якорь выполнен в виде каркаса с проволочной обмоткой, которая вводится в магнитопровод постоянного магнита статора. Для отсчета перемещений кареток используются датчики 2 и 6 на дифракционных решетках 1 и 5. Начальная установка положения кареток и периодический контроль их положения производятся датчиками базы 12 и 14 по дифракционным решеткам 11 и 13. К основанию координатного стола с помощью корпуса 39 и стоек 36 крепится платформа 18, предназначенная для установки и базирования ПФО. Блок экспонирования 15 с лампой ДРШ-350 также закрепляется на основании с помощью стоек 45. ПФО 19 устанавливается в держателе 20 на столике 26 рисунком топологии вверх и ориентируется по знакам базирования датчиками 35. Во время мультипликации координатный стол периодически смещается на шаг, равный размеру модуля или группы модулей, производится экспонирование и изображение ПФО с уменьшением в 10 раз проецируется на фотопластину - заготовку ЭФШ. Неплоскостность фотопластины может являться причиной нарушения масштаба проецируемого изображения, поэтому в фотоповторителе применена система автоматической фокусировки изображения. Датчик фокусировки включает осветитель 44, оптическую головку 43, блок сканирования 37 и фотоприемное устройство 17, соединенное с механизмом подачи воздуха. Вертикальное перемещение ЭФШ при автофокусировке производится за счет изменения давления воздуха в аэростатических направляющих координатного стола. Подвижное зеркало 38 датчика фокусировки может поворачиваться электродвигателем 42 через пару зубчатых колес 41. Загрузка ПФО 19 в держателе 20 на подвижный столик 26 производится с помощью пневмоцилиндра 16. Шток цилиндра входит в Т-образный паз держателя 20 и выдвигает его из кассеты 31. Ход штока ограничен микровыключателем 46. Ориентация ПФО производится перемещением подвижного столика кулачками 21. Приводы кулачков содержат электродвигатели 25 и червячные пе- |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |