 |
(495)510-98-15
|
|
Меню
|
Главная » Промышленная электроника 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 [ 126 ] 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 от линейного. Построенные по выражениям (6.101), (6.102) Kpt изменения во времени углов и аи при \ = 0,9 и 0,4 приведена рис. 6.34, б. Коммутация тока в НПЧ рассматриваемого типа осуществл ся, так же как в выпрямителях и ведомых инверторах, под дейст напряжения питающей сети. Поэтому минимальные значения у-а и 6 не должны быть меньше суммы угла коммутации у и угла 6mi \ /\ А /\ /\ /\ \/ \/ \/ \/ \/ I i < х 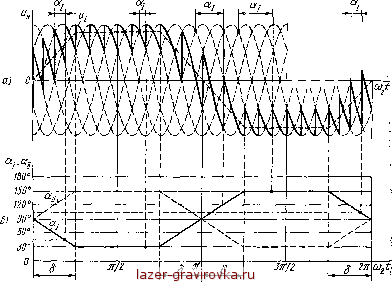 Рис. 6.35. Кривая выходного напряжения (а), характер изменения во времени углов а, и (б) НПЧ при трапецеидальном законе управления = 2л/i4 восстановления запирающих свойств тиристоров. Та образом, реально возможный диапазон изменения углов а, и ап формировании кривой выходного напряжения получается мен* 180°. Верхнему пределу регулирования напряжения соответст коэффициент I = 0,9-т- 0,95. Управление по арккосинусоидальному закону [см. соотноше. (6.101) и (6.102)] изменением углов а при формировании синусоид ного выходного напряжения связано с определенным усложнен системы управления преобразователем. В тех случаях, когда к фо кривой ив не предъявляются повышенные требования, использ более простой в реализации трапецеидальный закон формирова. выходного напряжения (рис. 6.35, а, б). Он характеризуется из нением по линейному закону углов а, аи на интервалах 6 и посто ством углов а., а , на интервалах я - 26 при формировании об полуволн выходного напряжения. Без учета пульсирующей сое ляющей кривая напряжения ип получается трапецеидальной фору регулирование выходного напряжения производится изменением диапазона управления углами alt ап при сохранении неизменным угла б. При уменьшении угла б закон изменения во времени углов аи и соответственно выходного напряжения ии приближается к прямоугольному. Трехфазные преобразователи выполняют на основе трех однофазных. Необходимый фазовый сдвиг выходных напряжений в 120° здесь осуществляется путем сдвига на указанный угол сигналов, управляющих изменением углов а трех преобразователей. Преобразователи могут выполняться регулируемыми по выходной частоте. Нижний предел регулирования частоты может быть близок к нулю. Верхний предел ограничивается отношением питающей частоты к выходной частоте f-Jf, которое обычно не бывает ниже двух. Это объясняется существенными искажениями формы кривой выходного напряжения при переходе на более высокие частоты /2. С целью расширения верхнего предела регулируемых частот питание преобразователей производят от источников тока более высоких частот, например 400 Гц. В этом случае выходная частота имеет реализуемый диапазон от 0 до 150-180 Гц. § 6.11. ПРИНЦИПЫ ПОСТРОЕНИЯ И ОСНОВНЫЕ УЗЛЫ СИСТЕМ УПРАВЛЕНИЯ ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ, ВЕДОМЫМИ СЕТЬЮ Система управления (СУ), обеспечивающая подачу отпирающих импульсов на тиристоры преобразователя любого типа, совместно с преобразователем решает комплекс задач, связанных с формированием и регулированием его выходного напряжения. В ведомых сетью преобразователях с естественной коммутацией (управляемых выпрямителях, ведомых инверторах, реверсивных преобразователях, непосредственных преобразователях частоты) существует общность в реализации систем управления. Она обусловливается идентичностью управляющего воздействия СУ на силовую схему, которое проявляется в изменении момента подачи отпирающих импульсов на тиристоры по отношению к синусоидально изменяющейся кривой напряжения сети (т. е. угла управления а). Поэтому, несмотря на то что приводимый ниже материал относится к управляемым выпрямителям, его почти целиком можно отнести и к остальным преобразователям данного класса. В силу того что СУ рассматриваемых преобразователей осуществляют регулирование фазы управляющих импульсов, их часто называют системами импульсно-фазового управления (СИФУ). Общими требованиями, предъявляемыми к системе управления преобразователем, являются: 1) надежное отпирание тиристоров силовой схемы во всех режимах ее работы; 2) плавное (в необходимом диапазоне) регулирование угла а по-Дачи управляющих импульсов на тиристоры; 3) высокая помехоустойчивость и надежность. Системы управления выполняют по синхронному асинхронному принципам. Синхронные системы импулъсно-фазового управления Синхронный принцип импульсно-фазового управления преобр зователями является наиболее распространенным. Его характерна* ет такая функциональная связь узлов СУ, предназначенных для лучения управляющих импульсов, при которой синхронизация упр ляющих импульсов осуществляется напряжением сети переменно! тока. Сущность синхронного принципа построения СУ и функционал ное назначение ее узлов покажем на примере выполнения канала равления одним тиристором преобразователя (рис. 6.36). В схему нала входят генератор опорного напряжен ГОН, нуль-орган НО и усилите л ь-формиро т е л ь УФ отпирающих импульсов. Генератор опорного (развертывающего) напряжения ГОН форЩ рует изменяющееся во времени напряжение и0 синусоидальной, тв угольной, пилообразной и других форм. С помощью НО опорное пряжение генератора сравнивается с управляющим напряжений Уа преобразователя. Когда опорное напряжение (в процессе его yf личения или уменьшения) достигает напряжения иуа, на выходе возникает импульс, который после предварительного усиления. формирования подается в управляющую цепь тиристора преобраа вателя. Изменяющееся во времени опорное напряжение создается с учг тием напряжения сети переменного тока (одной или нескольких фаз), в связи с чем опорное напряжение и формируемый импульс а хронизированы во времени с напряжением сети переменного ток! Путем изменения величины напряжения иуа осуществляются сдв? во времени выходного импульса и регулирование угла а, а с вательно, и выходного напряжения преобразователя. Управляющее напряжение иуа может представлять собой разнос (или быть пропорциональным ей) некоторого напряжения устав^ и напряжения, характеризующего регулируемый параметр (напр жение Ud, ток Id, частоту вращения якоря двигателя йит. д.). В эт случае система будет охвачена отрицательной обратной связью регулируемому параметру, что обеспечит его стабилизацию. Еслщ§ качестве управляющего напряжения использовать переменный нал, например синусоидальной формы низкой частоты, то будет ществляться модуляция угла а по синусоидальному закону, что тр буется для формирования кривой выходного напряжения непосрел ственных преобразователей частоты. Генератор опорного напряжения совместно с нуль-органом пр ставляют фазосдвигающее устройство ФСУ, явЛ ющееся важнейшим в синхронной системе управления (рис. 6.36). скольку работа ФСУ основана на сравнении двух напряжений (опб| |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |