 |
(495)510-98-15
|
|
Меню
|
Главная » Промышленная электроника 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 [ 122 ] 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 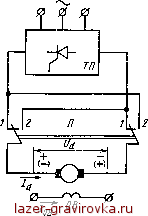 (является менее быстродействующим), чем при управлении по-якоря. Таким образом, выбор цепи управления определяется кон* ными требованиями к приводу. При работе с теми или иными производственными механизм1 часто необходимо изменять направление вращения двигателя (ос ствлять реверс). Изменению направления вращения обычно сопу* вуют такие требования, как быстрое то же время плавное) торможение и п ный набор скорости. Реверс направления вращения при* ного двигателя может достигаться и! нением полярности подводимого к ящ напряжения либо изменением направлеГ тока обмотки возбуждения. С этой цё} в цепь якоря или обмотки возбужде? вводят контактный переключатель или пользуют два управляемых тиристор4 преобразователя. Структурная схема реверсивного! ристорного преобразователя с контакт переключателем в цепи обмотки j (используется двигатель постоянного I независимого возбуждения) показана, рис. 6.29. В этой схеме, как и в больтц стве преобразователей, предназначен для электропривода, режим выпрямлё, чередуется с режимом инвертирован} Так, например, при наборе скорост режиме пуска и ее стабилизации в условиях повышения нагрузки валу двигателя тиристорный преобразователь работает в режиме в прямления, сообщая энергию двигателю. При необходимости тор жения и последующего останова двигателя поступление энерп- нему от сети через преобразователь прекращают, переводя последи в режим инвертирования. Машина постоянного тока под деиста инерционной массы на ее валу переходит в режим генератора, в вращая накопленную энергию через преобразователь в сеть пере; ного тока (рекуперативное торможение). Работу схемы рис. 6.29 удобно проанализировать с помо рис. 6.30, на котором приведены совмещенные внешние характе стики реверсивного тиристорного преобразователя, соответствую * режимам выпрямления и инвертирования. Характеристики пока-ны без учета их нелинейности в области малых токов /а, вызывае прерывистостью тока ld преобразователя в этой области в условй реальных значений индуктивности Ld <оо сглаживающего дрс' ля. Поскольку механические характеристики двигателя посто' ного тока независимого возбуждения М = F(n) определяются нап жением, приложенным к якорю, и характером его изменения в. висимости от нагрузки, семейство внешних характеристик преоб. зователя на рис. 6.30 можно рассматривать и как семейство меха Рис. 6.29. Структурная схема реверсивного ти ристорного преобразователя еских характеристик двигателя (при 10в = const, п ~ Ud, М ~ 1 d). Момент нагрузки на валу двигателя УИН принят постоянным и не за-иСящим от частоты вращения п. В Предположим, что контактный переключатель П на рис. 6.29 находится в положении /. Для осуществления режима пуска тири-сторный преобразователь (777) вводят в режим выпрямления (РВ) 11-Р.И I-PB 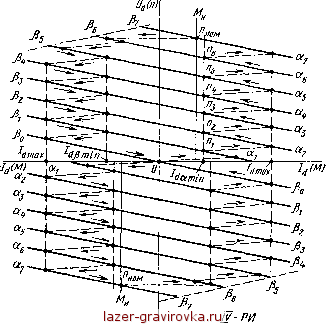 /-РВ -Ud(n) Рис. 6.30. Совмещенные внешние характеристики реверсивного тиристорного преобразователя постоянного тока с углом управления а„ близким к 90°. Двигатель начинает набирать скорость с прямым направлением вращения при небольшом напряжении Vф полярность которого указана на рис. 6.29 без скобок. Текущие значения Vd, Id при прямом направлении вращения двигателя определяют траекторию перемещения рабочей точки преобразователя в квадранте /. Увеличение частоты вращения двигателя при пУске осуществляется повышением подводимого напряжения Vd за счет уменьшения угла управления а, чем достигается переход рабочей точки на выше расположенную внешнюю характеристику преобразователя. Сглаживающий дроссель Ld в цепи постоянного тока Tfl препятствует быстрому нарастанию тока Id при переходе рабочей т°Чки с одной характеристики на другую. Вследствие указанного Этапам перехода на рис. 6.30 соответствуют пунктирные кривые, Наклон которых относительно оси токов зависит от темпа пуска ДвигатеЛ ] двигателя и величины Ld. Повышение частоты вращения будет происходить по зигзагообразной кривой, состоящей из пууЖ тирных участков и участков внешних характеристик выпрямители Повышение темпа пуска двигателя сопровождается увеличением пусковых токов. В условиях необходимого их ограничения на уровне /dmax преобразователя, определяющем предельно допустимые зна. чения анодных токов тиристоров, сокращение периода пуска достигается приближением тока 1йчт\п к току /dmaX. При высоком темпе пуска и большой величине Ld изменение угла а будет происходить при практически неизменном токе ld, в связи с чем режиму пуска будет соответствовать перемещение рабочей точки по прямой, параллельной оси Ud, со значением Id = Idmax. Задачу ограничения токов решают установкой в преобразователе датчика тока Idmax, сигнал которого вводится в систему импульсно-фазового управления и воздействует на характер изменения угла а в режиме пуска. В системе осуществляется отрицательная обратная связь, обеспечивающая при пуске неизменный ток /d /dmax- Помимо указанного, эта обратная связь выполняет функцию токовой отсечки, защищающей преобразователь от перегрузок по току в аварийных режимах. Режим пуска заканчивается переходом рабочей точки на внешнюю характеристику с углом а, при котором обеспечивается требуемая частота вращения двигателя. С целью стабилизации частоты вращения при изменении нагрузочного момента в систему вводят отрицательную обратную связь по скорости, воздействующую на угол it Напряжение, пропорциональное частоте вращения, снимается с тахогенератора, устанавливаемого на валу двигателя, и подается в систему импульсно-фазового управления преобразователем. Торможение двигателя осуществляют переводом преобразователя в режим инвертирования, что означает переход рабочей точки на характеристики преобразователя в квадранте (рис 6.30). Для этого контактор П в схеме рис. 6.29 переключают в положение 2 (чем достигается изменение полярности подключения двигателя к преобразователю) и увеличивают угол а до значения а> л/2, задав соответствующий угол В = л - а. Машина постоянного тока переходит в режим генератора, и у нее возникает тормозной момент. Кинетическая энергия, накопленная инерционными массами на валу двигателя, преобразуется в электрическую энергию и отдается через преобразователь в сеть переменного тока. В результате торможений частота вращения двигателя и индуцируемое им напряжение Ud снижаются. Уменьшаются ток Id и создаваемый тормозной момент. Рабочая точка перемещается вправо по характеристике преобразовать ляс параметром В, обозначенным на рис. 6.30 В6. Для того чтобы сохранить тормозной момент на данном уровне, добившись тем саиЩ более быстрого останова двигателя, необходимо увеличить угол Д> т. е. осуществить переход на ниже расположенные входные харакш ристики инвертора, как показано на рис. 6.30. Снижение частоты врЦ щения будет происходить по зигзагообразной кривой, включаюШ§ промежуточные пунктирные участки и участки входных характеристик инвертора. |
|
© 2026 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |